|
| 2013 |
 |
| 2012 |
Not as dramatic growth as I would’ve expected 🙂
 |
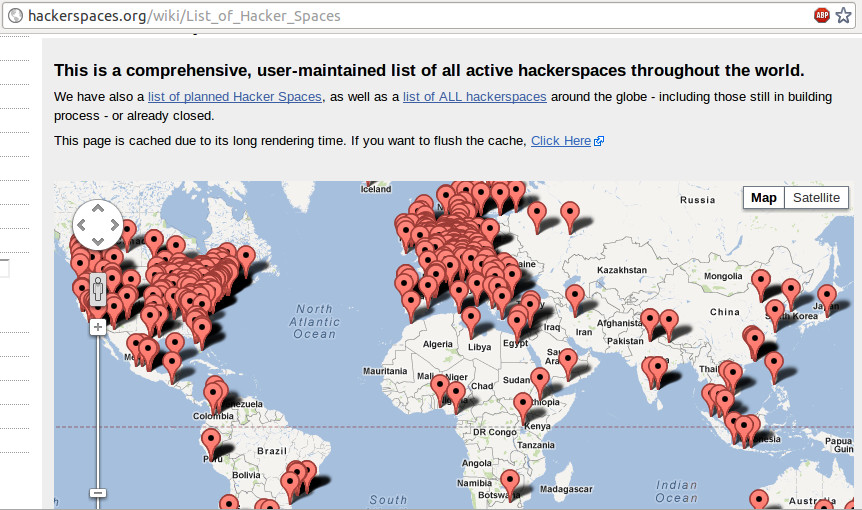
| something interesting to compare to — people taking Learning Creative Learning as of the third week of class or something |

|
| 2013 |
|
| 2012 |
|
| something interesting to compare to — people taking Learning Creative Learning as of the third week of class or something |
inspired by Designer Nori except theirs turned out a lot better (how did they get their seaweed to burn so white and not be affected by the humidity of the rice?)
 |
| Designer Nori. img src [x] |
recently made some sushi for the excellent cathy wu
lasercutter settings epilog 120w: raster, 600dpi, 100% speed, 5% power
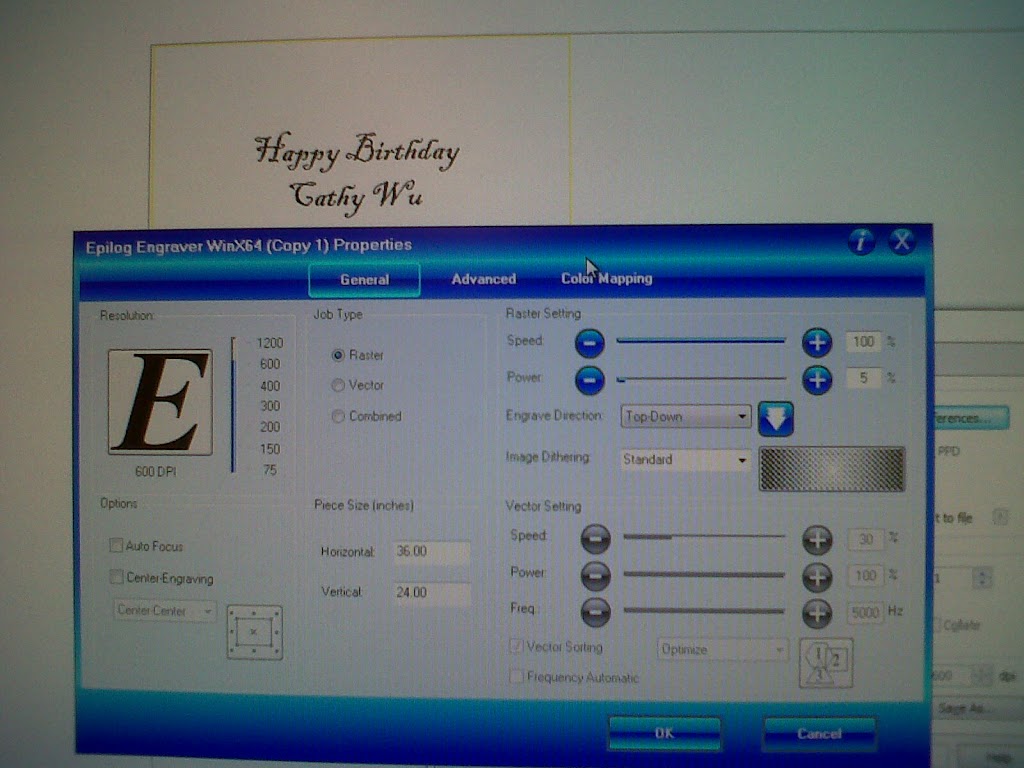
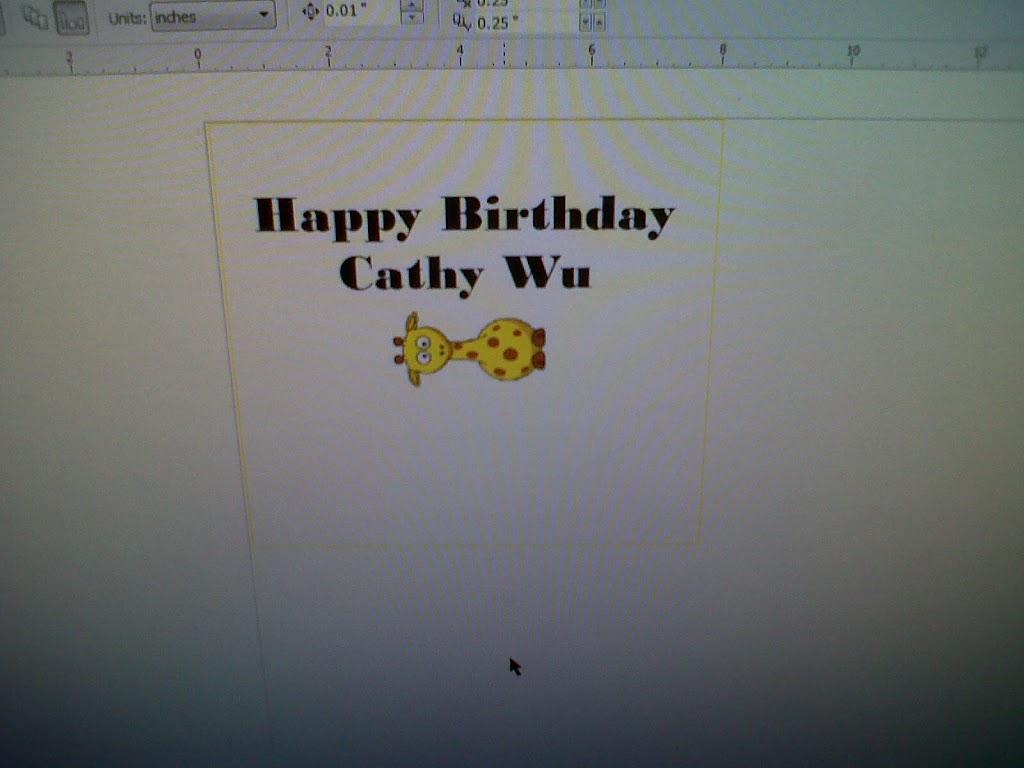
step 1. coreldraw + clipart I borrowed from the internet
step 2. print to lasercutter using aforementioned settings
(without taping the seaweed down, it would go flying everywhere thanks to air assist constantly pulling air out of the lasercutter)

step 3. make all the ingredients for sushi
(rice with white wine vinegar seasoning, some raw bell pepper, a lightly boiled green onion strand, egg, and some carrots blanched for two minutes, where I learned blanche = immediately quench in cold water to stop cooking from continuing)
I didn’t try any so +Cathy Wu will just have to let me know how it tastes.
 |
| words facing up just for show! obviously no one will read something on the inside of the sushi roll… |

step 4. roll it up
rice goes on 2/3 of the roll. make sure to spread the rice in the right place (just think about it carefully) and that the words are facing down unlike the previous picture which is just for show or else the words will be covered up.
Seems to fair worse when the humidity of the rice affects the seaweed.
 |
| i’m wearing a chaihuo tshirt — it’s a makerspace in shenzhen, china |
Nyansushi?
Obligatory nyancat related laser thing.

Hexapod now has 18 working servos again! yay.
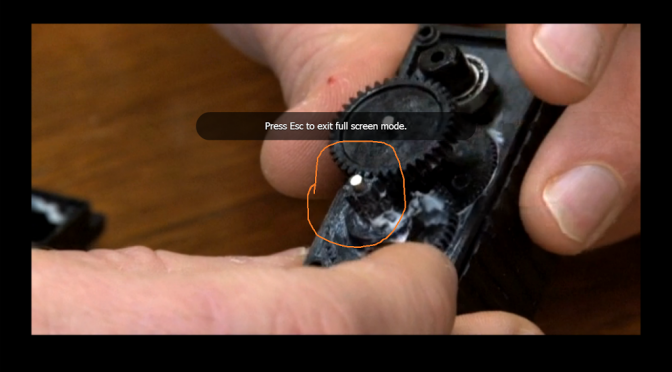
Servo Failure modes
I didn’t strip the gears* on one of my servos from applying to much load to it (the way I expected my servo to fail), but rather stripped the threads on the servo to servo horn coupler.
*see http://techtv.mit.edu/videos/10523-what-is-design-an-example for a good video of designing a robot, having the gears strip, and solving that problem with rubber “shock absorbers.” This video is shown near the very beginning of 2.007 Design and Manufacturing I, a sophomore build-robots mechanical engineering class.

$9.98 for 2, or $4.99 each.
Probably I paid way too much but whatever. At the time I thought $5 was really cheap for a servo (now I think $3 is more reasonable price for this servo). Bought 2/9 and delivered 2/19, not bad.

 |
| left: 4-40 screw mates fine with servo horn. top: a 4-40 tap. right: A proprietary screw with mysterious thread count and pitch next to a nylon 4-40 screw. |