
In the previous post I described three quick steps (well… sometimes mbed is pretty slow) to get started with NRF51-DK on Ubuntu 14.04.
Yesterday I was able to get the NRF51-DK to talk to my phone, which was pretty exciting.
In short
For NRF51-DK:
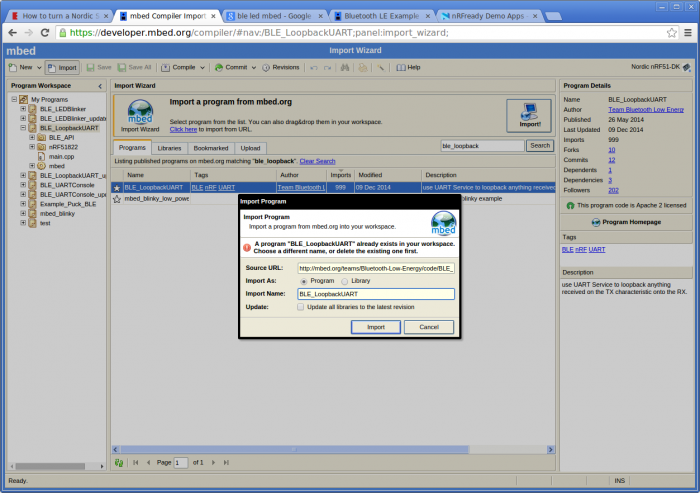
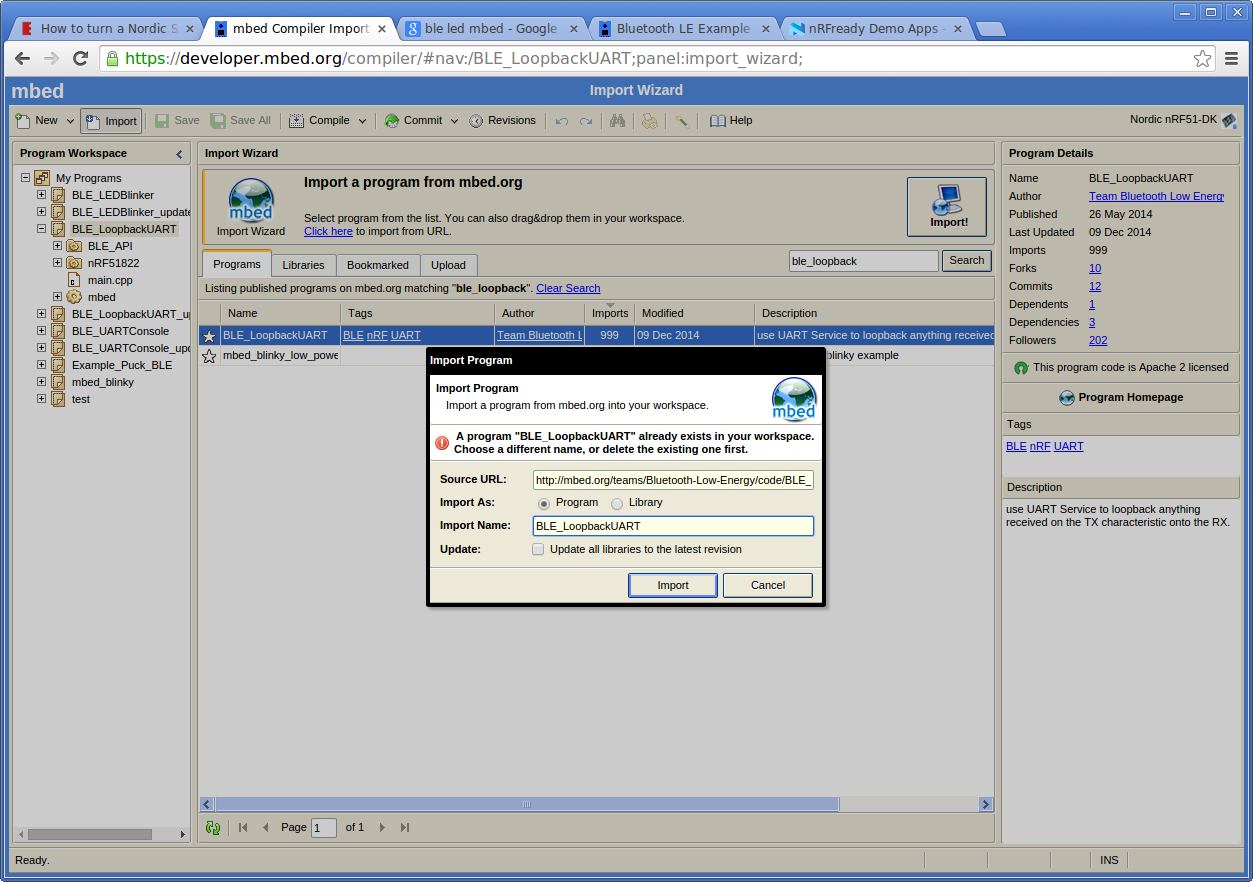
- Open mbed compiler
- Import > Click on “programs” tab instead of “libraries”
- Search for “BLE_LoopbackUART” > Import
Note: Do NOT check “update libraries”, unlike what this Evothings post suggests, checking “update libraries” actually threw errors and failed to compile in the next step, whereas if I went back and re-imported checking “update libraries”, it compiled fine - Compile and save file
- Copy to JLINK to upload.
Note: Make the NRF51-DK is turned ON and connected to laptop
On Android:
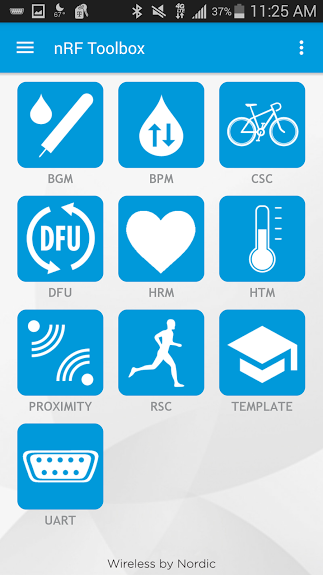
- Using Google Play, install NRF Toolbox from Nordic
- Open and click on UART
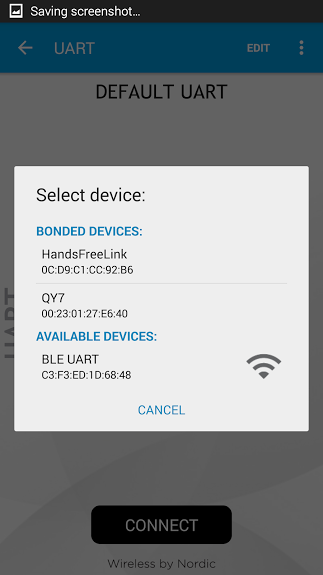
- Click Connect (say “yes” to turning on bluetooth if you haven’t already)
- Click the “…” > Show log
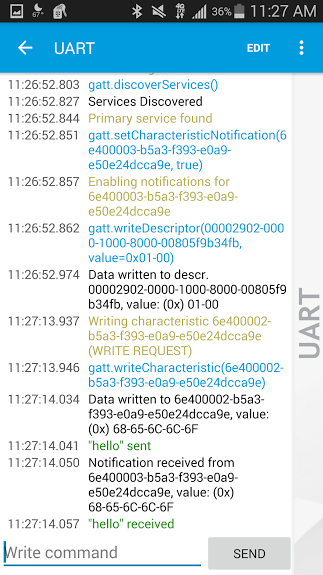
- Write “hello” > SEND
- Click “↵” on your android phone or scroll to the bottom of the log
- You should see it say “hey” sent and “hey received” 🙂
In Long (with screenshots)
- Open mbed compiler
- Import > Click on “programs” tab instead of “libraries”
- Search for “BLE_LoopbackUART” > Import
Note: Do NOT check “update libraries”, unlike what this Evothings post suggests, checking “update libraries” actually threw errors and failed to compile in the next step, whereas if I went back and re-imported checking “update libraries”, it compiled fine
- Compile and save file
- Copy to JLINK to upload.
Note: Make the NRF51-DK is turned ON and connected to laptop
On Android:
- Using Google Play, install NRF Toolbox from Nordic
- Open and click on UART
- Click Connect (say “yes” to turning on bluetooth if you haven’t already) and select the “BLE UART” device near you
- Click the “…” > Show log

- Write “hello” > SEND
- Click “↵” on your android phone or scroll to the bottom of the log
- You should see it say “hey” sent and “hey received” 🙂
NRF Toolbox UART log showing sent and received messages
Tada! That’s it.
Next, servos and robots! Then, many hours of porting code from Arduino to ARM.