A while back I wanted to try to make an actually functional rock-candy rainbow-colored xylophone. i’m not sure how to verify whether rock candy can produce musical notes except to make some rock candy, but here is a wrench xylophone
I consort with some interesting people now on the open-source-hardware mailing list.
I suspect this is how my ideas would all end up looking like if I didn’t have some awesome friends who put up with my crazy rants and criticize me and force me to make sense… (function sort of like academic reviewers, but in-person and my friends can unplug me from the internet and force me to go sailing when I get really unhinged)
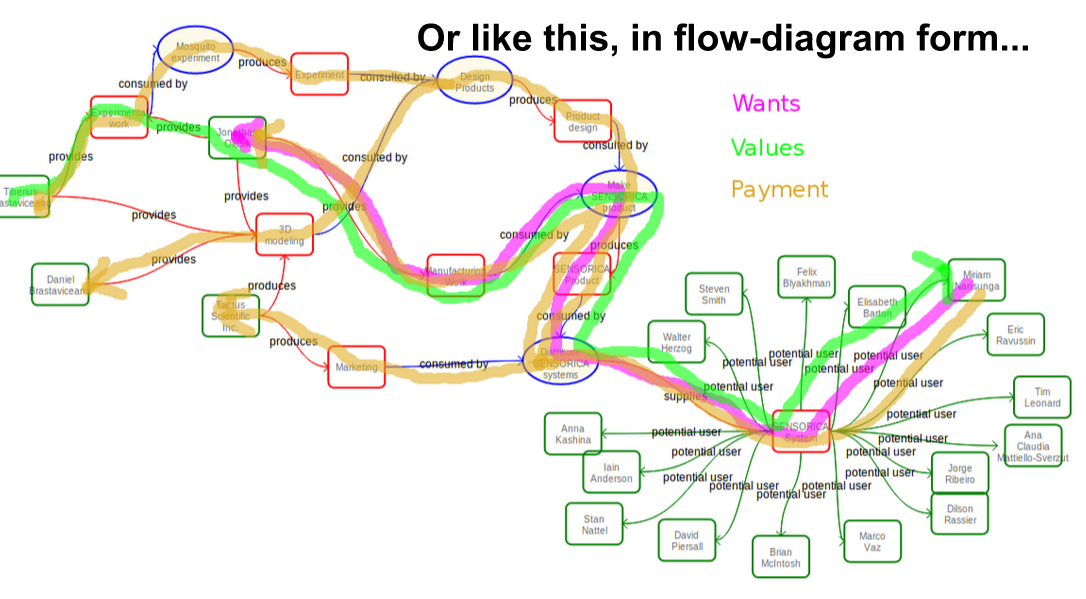
Sensorica has some interesting ideas behind it, but it’s hard to access through a layer of what, for lack of a better term, I must describe as “crackpottery”. maybe genius is just refined crackpottery?
However, the term craze is also used to refer to minute cracks in pottery glaze, again suggesting the metaphorical connection of cracked potswith questionable mental health. (src)
Heck it appears I’m halfway there according to some made-up-indexing method…
1. Cranks insist that their alleged discoveries are urgently important.
2. Cranks love to talk about their own beliefs, often in inappropriate social situations, but they tend to be bad listeners, being uninterested in anyone else’s experience or opinions.
Anyway, here’s my own (mostly coherent, but very long) post on the topic of open-source hardware and its relation to economics.
long post is long
I agree that our current economic system (capitalism) has inspired an amazing amount of innovation via the (greed + cash + ego –> innovation) cycle. I would much rather live in 2014 than in 1714.
However, we can definitely say that this incredible innovation / economic system has its downsides — unwillingness to confront global warming, marketing cigarettes to developing countries since advertising is heavily restricted in developed countries [1] [2] [3], marketing baby formula instead of breast milk[5], verizon/comcast [6], these are some obvious examples of how corporate systems have led to evil / “not good”, without even talking about the overall distribution of resources in the world (why does poverty still exist?).
I agree that open & closed ecosystems are not exclusive. But I sometimes wonder if as a society we are kind of like the Hollywood studio execs — “each movie is 500 million dollars, let’s not risk doing anything different like having perse female characters.”
For instance, from what I understand, the Republican point of view is that “our current economic system has led to great advances in technology that has bettered everyone’s life. This system may be unjust and rife with a whole host of issues, income inequality may be set to worsen forever, the planet may become inhospitable to humans, but we should not risk trying anything else.”
There’s actually no way to tell who will be right in the short- or long-term future. However, I strongly do want to encourage or get out of the way of people who want to experiment with these more “peer-based” models of production, where “everything is shared and people benefit from each others’ knowledge and contributions.”
I personally think this is what we should move toward in the future, and these pangs of “opensource work / socially conscious work / academic research is not rewarded equivalently in cold, hard, cash” are the result of a transition between the two models, where ultimately we end up in 100% open–source land. But my personal opinion is pretty irrelevant, it’d take hundreds of years to arrive at this sort of scenario, and for all I know a mixture of the systems may be the most stable or ideal state. I recognize the human limitations to my knowledge and personal beliefs. tl;dr I don’t make for a great revolutionary ;P
Getting back to the original point, yea, cool people work for both lots of money and lots of purpose, and although working for lots of money can lead to bad things, working for lots of purpose can lead to bad things too [7] [8], so we shouldn’t unilaterally judge people either way (although, as puny humans, we invariably will stereotype in order to function in life).
Anyway, philosophy hour aside, now I’m going to go back to rabidly supporting open–source just like Apple fanboys support Apple! 😛
“Yes, [x], you’re right. I recently saw Linus Torvalds in Central begging. Richard Stallman hit me up for a job washing my windshield.
Just joking of course, people make lots of money off of commons-based production. Check out some of the economics of “free revealing” of ideas by Eric von Hipple (MIT) or Yochai Benkler (Harvard). It’s not the zero sum game you represent. Benkler’s book is affordable, even if you only make 90k”
Review: While some of Benkler’s arguments and examples are fascinating and easily read, they are sandwiched between portions of confusing, thick, often heavily theoretical prose. […] In spite of these attempts to make this book more accessible, it is probably best suited to an academic or technical audience; those with an interest and background in the topics discussed. (src)
Review: There is no doubt that the continued lower costs and democratization of the tools and distribution of things previously the realm of pros is reshaping our world. But this book reads like a college textbook. More academia than Malcolm Gladwell or Chris Anderson. Which I guess is good if you’re a true researcher. (src)
Heehee. Guess academics try so hard to distinguish themselves from crackpots that to laypeople they reach another dimension of incomprehensibility.
Update: Just read this thanks to Ned —
relatively flat networks can quickly generate hierarchical structures even without any attempt at a power grab by emergent leaders or by any organizational, coordinated action.
basically, for networks to remain flat, they must be engineered to stay that way, since they’ll strongly tend to un-flatten, especially thanks to social media