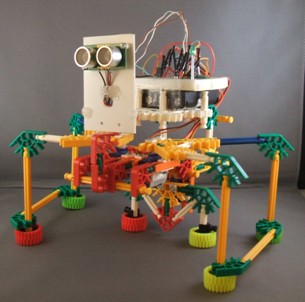
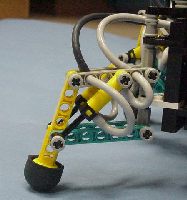
I’ve had this recurring problem where the set screws on hexarideablepod prevent the aluminum torque transmission bar from slipping radially on the shaft, but have issues preventing it from slipping axially.
Today I learned today courtesy of Mars, regarding ways to prevent axial slippage:
- Retaining rings (clips, e-clips, c-clips, circlips) are more for axial alignment, not very load-bearing
- E-clips are “Side-Mount External Retaining Rings”
- the middle part of the E isn’t supposed to go inside a keyway.
Yea, that retaining ring I put on earlier (sticking the middle part in the keyway and dremeling an imprecise groove for the other “ear” parts of the e) wasn’t actually being that useful, although it did seem to help. - Cotter pin + washer is a good solution,
- can probably take a hand drill even and drill a small diameter hole through the shaft
- Even a small divot instead of a flat channel will go a long way to helping the set screws not slip around the shaft
- I could mount a steel plate to my aluminum linkage and weld the linkage permanently to the motor shaft steel,
And then finally the “duh” easiest solution, since I’m only concerned about inward slippage, is make a PVC standoff.
This is super exciting, since I can finish this in 15 minutes (wellllll. If our bandsaw wasn’t out of service…. a long story… oh MITERS) and then the hexarideablepod will be mostly mechanically robust.
The electricals will be a piece of cake because I found drill triggers that are 24V 16A and make me happier than my 15V triggers. (yea, yea, I should make my own dumb motor controllers, but the packaging is just so convenient. People will even sit on turned-off hexarideablepod and play with the triggers just because). So I just need to rewire that, and make a more permanent battery mounting solution, and I’m all set.
Oh, and find another tennis ball, I lost one of my floor protectors.
Also add some 12V rgb LED strip lighting.
Next for NYC Maker Faire:
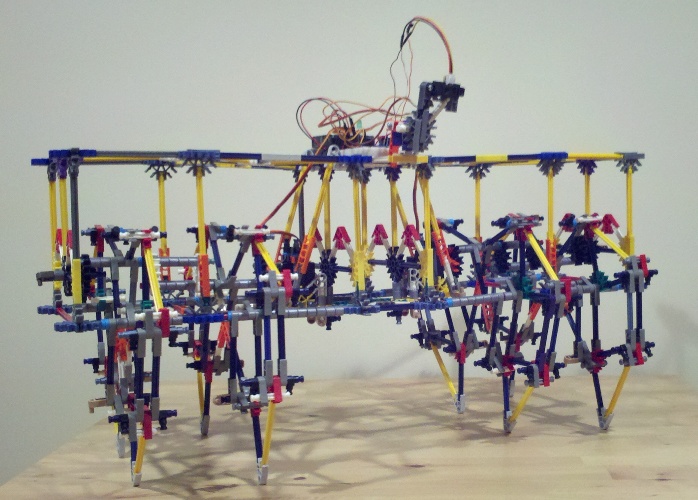
- hexadancingpod
- model & print new body
- buy new pololu serial servo controller because I am too lazy to make my own
- build battery pack
- buy accelerometer and ultrasound (or find)
- write software
- nyancat singing poptart
- arduino + speaker
- arduino + piezo
- attiny + piezo -> buy surfacemount attiny’s, scrounge up piezos (get digikey account)
- vending machine
- add buttons
- if time, add ir led sensors
- ??? payment ???
- pov poi
- buy rgb LEDs
- route board
- packaging?
Other notes:
My shaft measured about 43/64” (672 mil) , so it seems like the standard given motor shaft diameters, in this case 3/4” (725 mil), is larger than the actual shaft size (? check this with someone).
========
Some notes I was taking:
Common ways of preventing axial slippage in the inward direction:
(also this is a useful comparison http://awtarlab3.engin.umich.edu/wiki/index.php/Methods_for_axially_retaining_components_on_a_shaft)
- cotter pin
- requires drilling a thin hole all the way through the motor shaft
- retaining ring http://www.mcmaster.com/#retaining-rings/=jcg38v
- requires machining a precise groove all around the motor shaft
- which means if I lamely do it with a dremel (how do people do it anyway? build a fixture with a cutting edge, apply power to the motor, in a temporary lathe sort of way?) then the retaining ring isn’t going to be very strong (it’ll pop out).
- I’m not sure about installing it since I have keyways on both sides of the shaft so it’s hard to not have one of the ends of the “e” dig into a keyway instead of a groove.
For visualization, see this site: http://www.rotorclip.com/green_ring.php
Useful:
http://www.engineersaustralia.org.au/sites/default/files/shado/Learned%20Groups/National%20Committees%20and%20Panels/Engineering%20Design/Part%205.pdf
http://www.wittenstein-us.com/tech-support/resources/documents/WittensteinKeyedvs.Keyless.pdf