
to get
persistent keyboard shortcuts / hotkeys in eagle,
since eagle’s UI leaves something to desired for me
you need to add lines to the eagle.scr file in the “scr” folder of your eagle installation
e.g. for my windows desktop that is: “C:Program Files (x86)EAGLE-5.11.0screagle.scr“
here’s what mine’s set at:
# Configuration Script
#
# This file can be used to configure the editor windows.
# eagle Configuration Script — persistent hotkeys
# nancy ouyang
# 13 dec 2011
Assign F1 ‘wire’;
Assign F2 ‘move’;
Assign F3 ‘del’;
Assign F4 ‘group’;
Assign F5 ‘name’;
Assign F6 ‘label’;
Assign F7 ‘value’;
Assign F8 ‘copy’;
Assign AF1 ‘route’;
Assign AF2 ‘ratsnest’;
Assign AF3 ‘rip’;
emergency high-power h bridge
is in progress and due in oh 18 hours or so (still need to finish schematicking). because i’m actually rich (i live off of instant noodles because i’m a cheap student and would much rather spend the money on delicious components for projects), or at least i feel rich when immersed in the general uh resourceful atmosphere of MITERS / east campus, i bought delicious power components. (as opposed to relying on 6.131 lab ones).
anyway so I emergency learned myself some theory. as usual with my schoolwork, the path of this project went “i’m really lost, but too proud to ask for help so let me confuse myself on the internet”. several days later, i feel distinctly antisocial and hopeless and take lots of naps. a few days before the deadline, i start trying to do something and gradually i go “whoa it’s starting to make sense.” then i go “whoa maybe there is hope after all! I should try to complete this in time” followed by “AAAHHH this is due in [too little time] emergency project!!1!1!!”
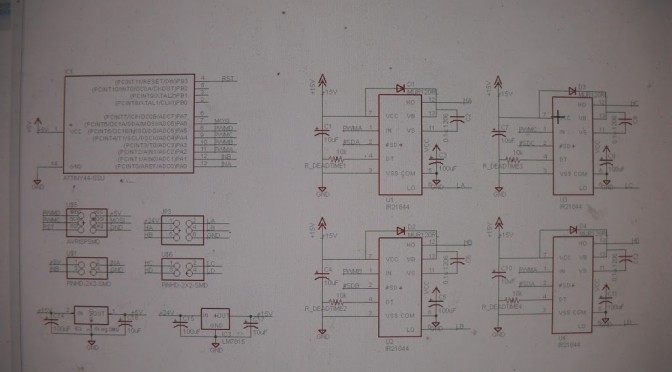
current WIP progress (clearly not finished and there are errors, need more buscap, mislabeled components, etc) —

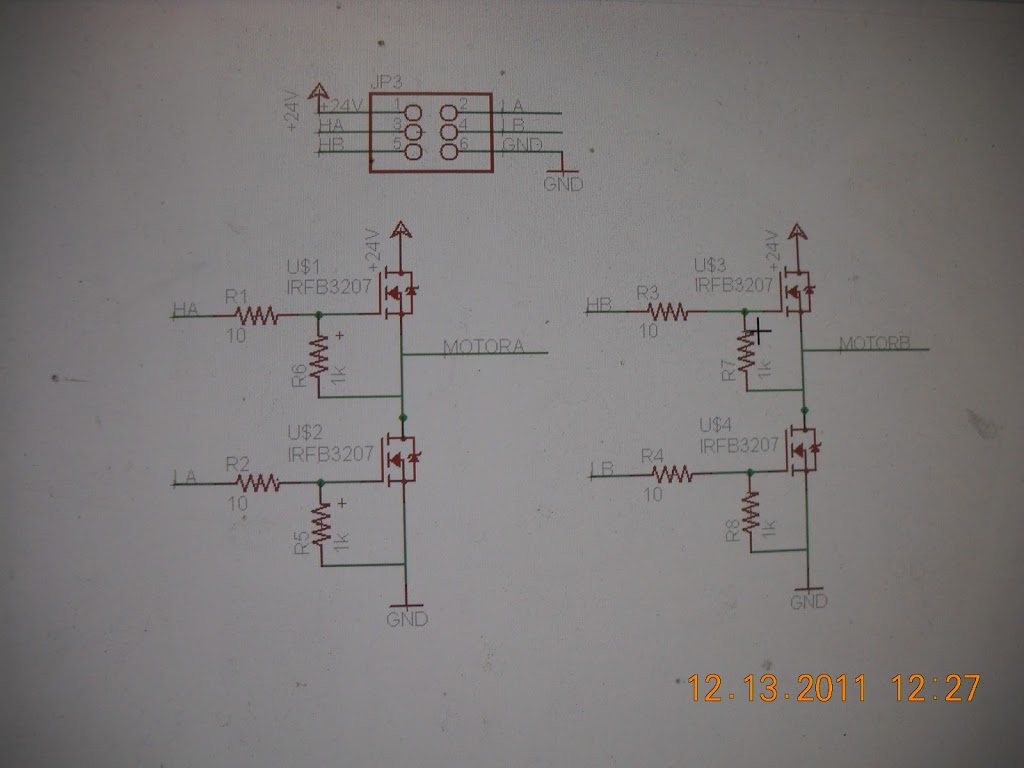
i referenced shane colton’s hexbridge / other motor controllers and charles guan’s tinytroller / other motor controllers.
h bridge links
that i used to read up on everything i was supposed to already know:
http://robotechno.us/high-current-h-bridge-with-mosfet.html
this is a good speedy intro to why+ theory + practicals of making your own h-bridge (n+p mosfet design, as opposed to nmosfet-only w/ driver)
http://roko.ca/robotics/h-bridge-fundamentals/1
more links here
http://www.opencircuits.com/Motor_driver
===misc links===
using chip http://www.robotroom.com/HBridge.html + thermal data http://www.robotroom.com/Thermal-PCB-Motor-Driver-Tests-4.html
steppers http://www.massmind.org/techref/io/stepper/hipwrbp-gm.htm
dc motors overview http://www.electronics-tutorials.ws/io/io_7.html
robot power http://www.robotpower.com/downloads/
stepper drivers http://www.nerdkits.com/forum/thread/694/
more reference yay open source hardware http://www.robotpower.com/products/osmc_info.html
stepper and motor control math!theory http://www.divms.uiowa.edu/~jones/step/circuits.html
lots of different h bridge implementations (schematics) http://circuitelec.blogspot.com/2009/07/h-bridge-motor-driver-circuit.html
look, half bridge can be reversible if you have negative rails (terminology ftw) http://www.me.berkeley.edu/ME102/lab3.html
steppers i have access to http://store.makerbot.com/nema-17-stepper-motor.html
because the awesome built in delay fet driver http://www.irf.com/product-info/datasheets/data/ir2184.pdf
==more specific to me links==
http://search.digikey.com/us/en/products/2318-H-RC/M8842-ND/775381?wt.z_cid=ref_octopart_dkc_buynow
http://web.mit.edu/6.131/www/data.shtml
https://docs.google.com/document/d/1deiPGEL8JOQlO9pS5STD-jABaiG5eQzZwwNh8GDAdqQ/edit?hl=en_US
Half-Bridge Circuit Behavior by Dennis L Feuch
http://search.digikey.com/us/en/products/IRFB3207ZPBF/IRFB3207ZPBF-ND/1300656
http://www.etotheipiplusone.net/pics/fvm_3ph.png
http://etotheipiplusone.net/pics/seg/seg_74.jpg
http://www.etotheipiplusone.net/?p=642
http://web.mit.edu/first/kart/controller_rev1.pdf
http://scolton.blogspot.com/search/label/hexbridge
=====
{kind=link}
{kind=link}
wish me luck…