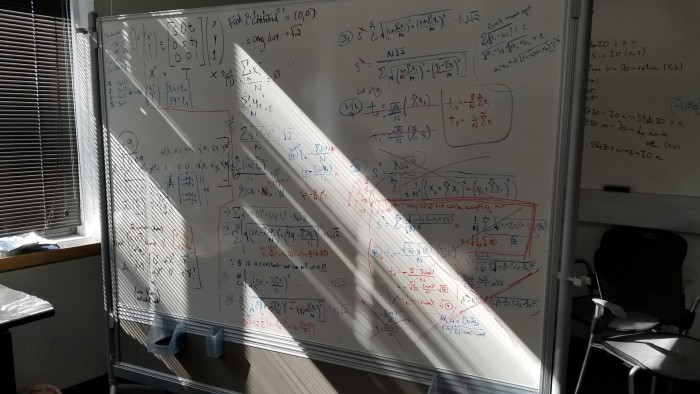
My lack of linear algebra is really destroying me in computer vision.
There are some pros about an expensive dining plan: there was all-you-can-eat sweet potato souffle at Dudley dining hall this week… and there was apple cobbler two weeks ago (almost as good as peach cobbler)
Other highlights:
I discovered Kanopy, where as a Harvard student, I can watch a lot of movies for free. For instance!! I could watch http://harvard.kanopystreaming.com/video/super-cute-animals Super Cute Animals
The Science of Adorable Animals BBC Harvard
Students also have free access to the Harvard Cinema. I’m going to watch Three Sisters this weekend. My grandma lived there, and I spent two summers in Yunan’s capital, Kunming (which is no doubt very different than rural Yunan!) hcl.harvard.edu/hfa/films/2017sepnov/wang.html#three
work pictures
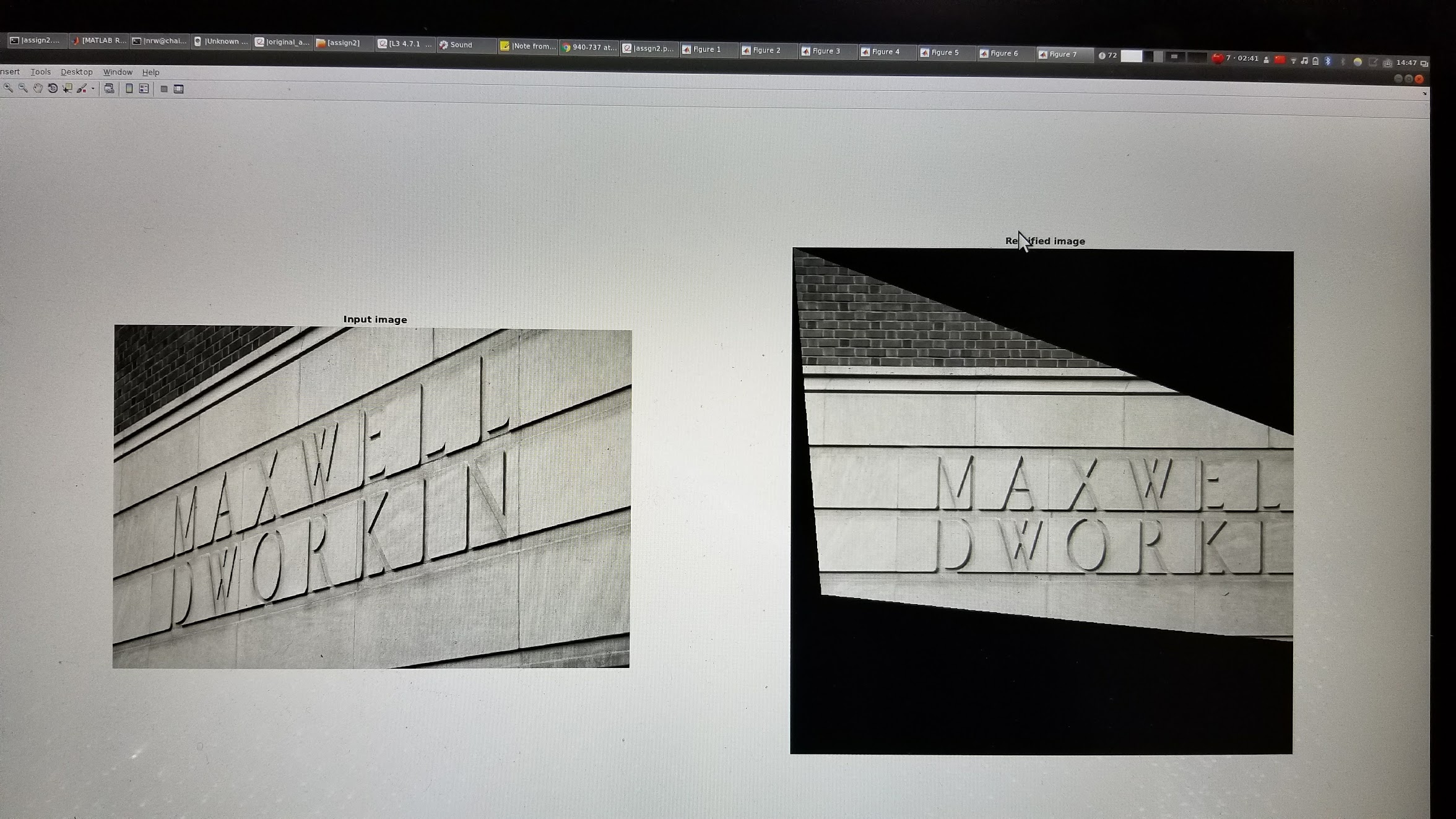
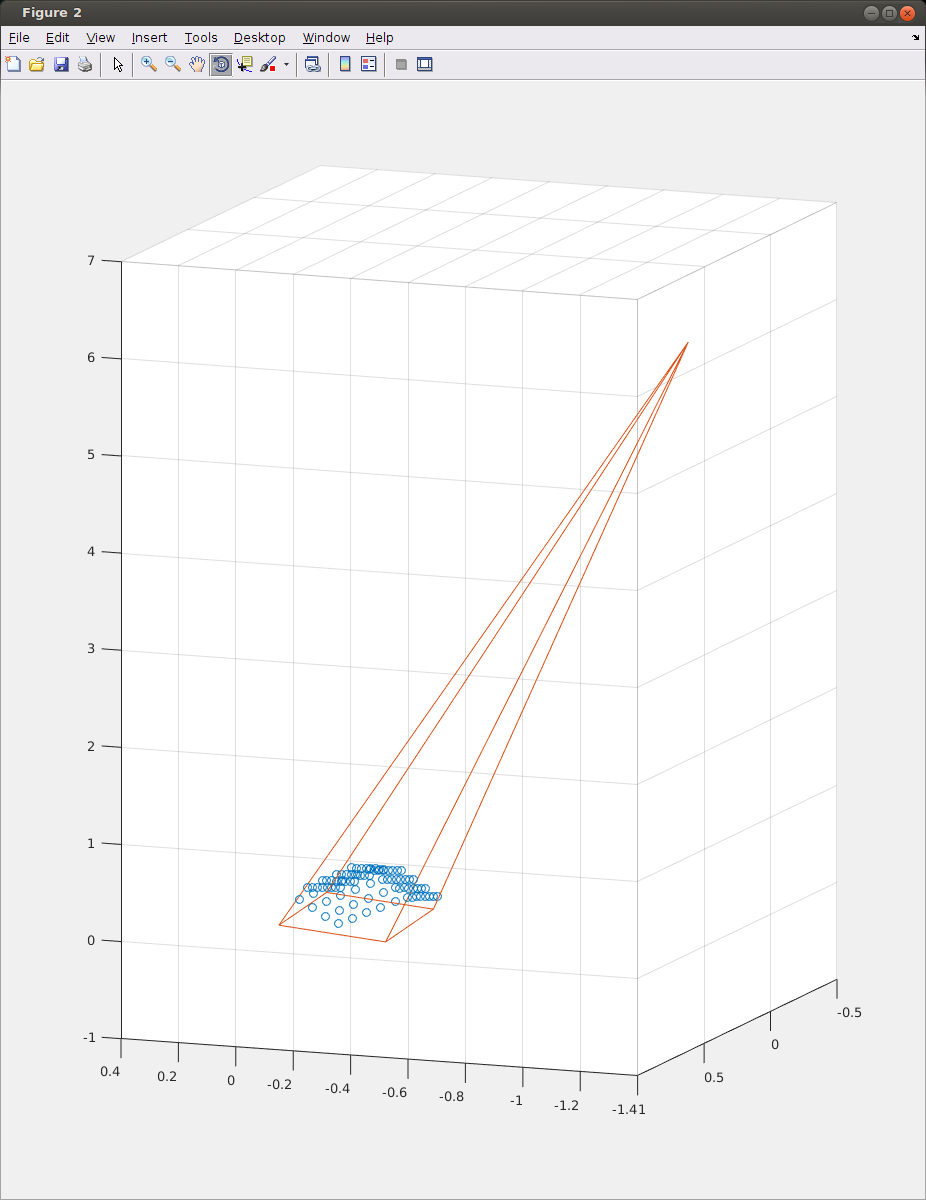
CS283 (intro to computer vision) — Pset 2 (metric rectification)
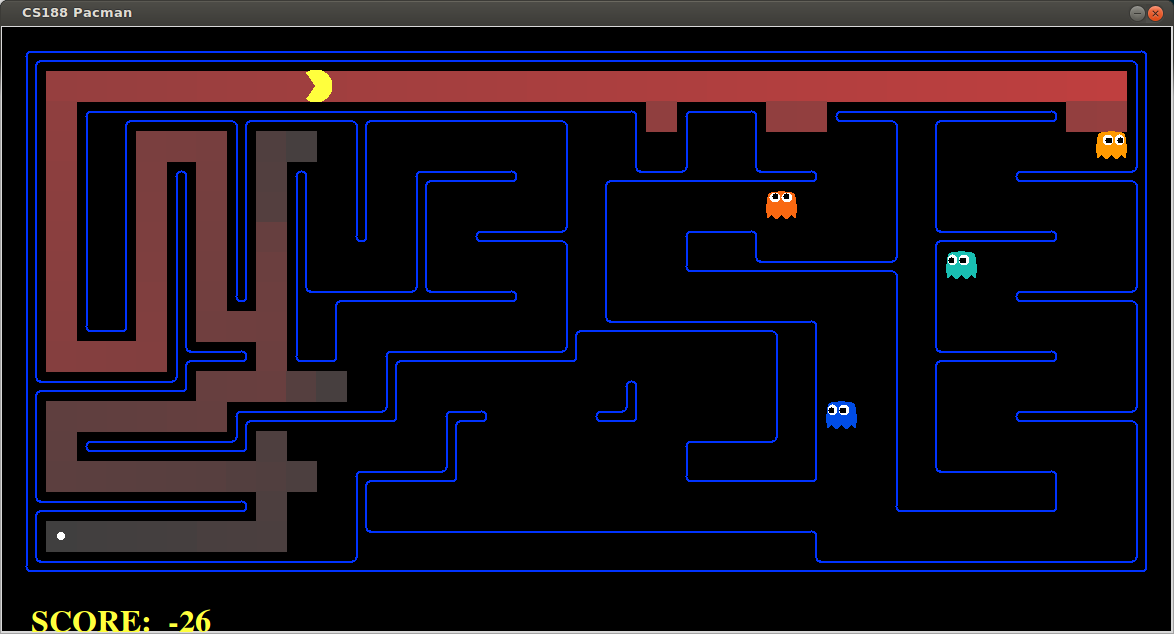
CS182 (into to artifical intelligence) — Pset 2 . Search (Pacman!)

CS 283 — Pset 3 (camera matrices and binocular rectification)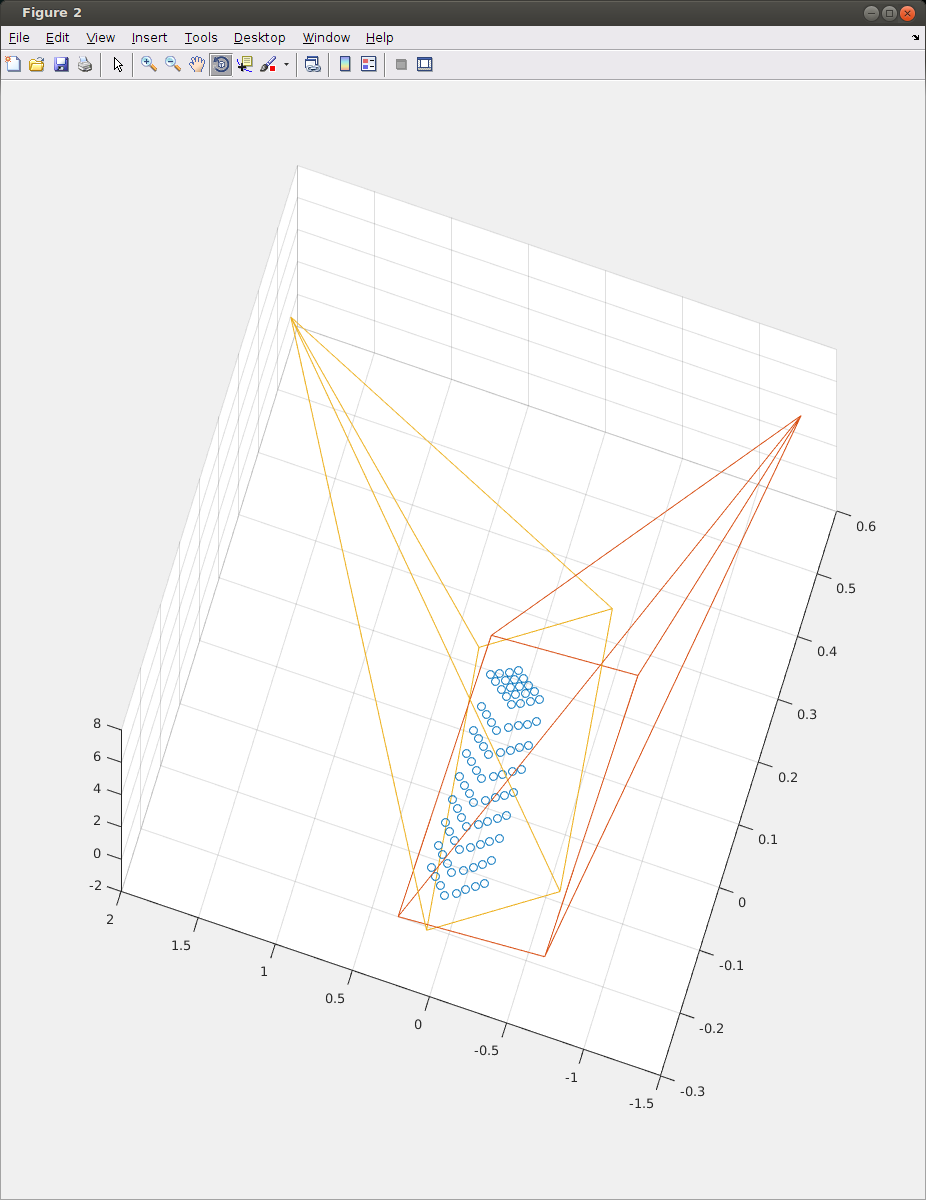
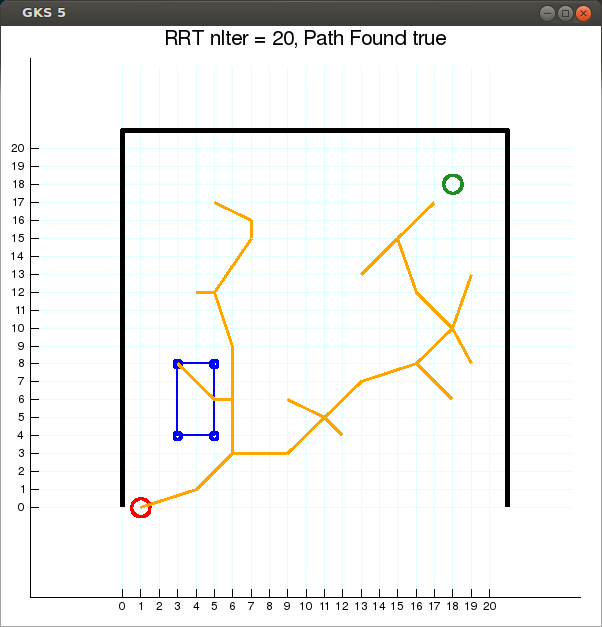
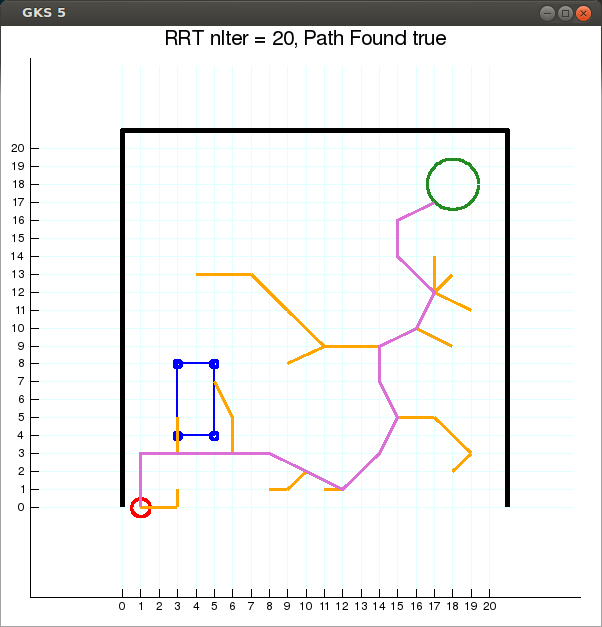
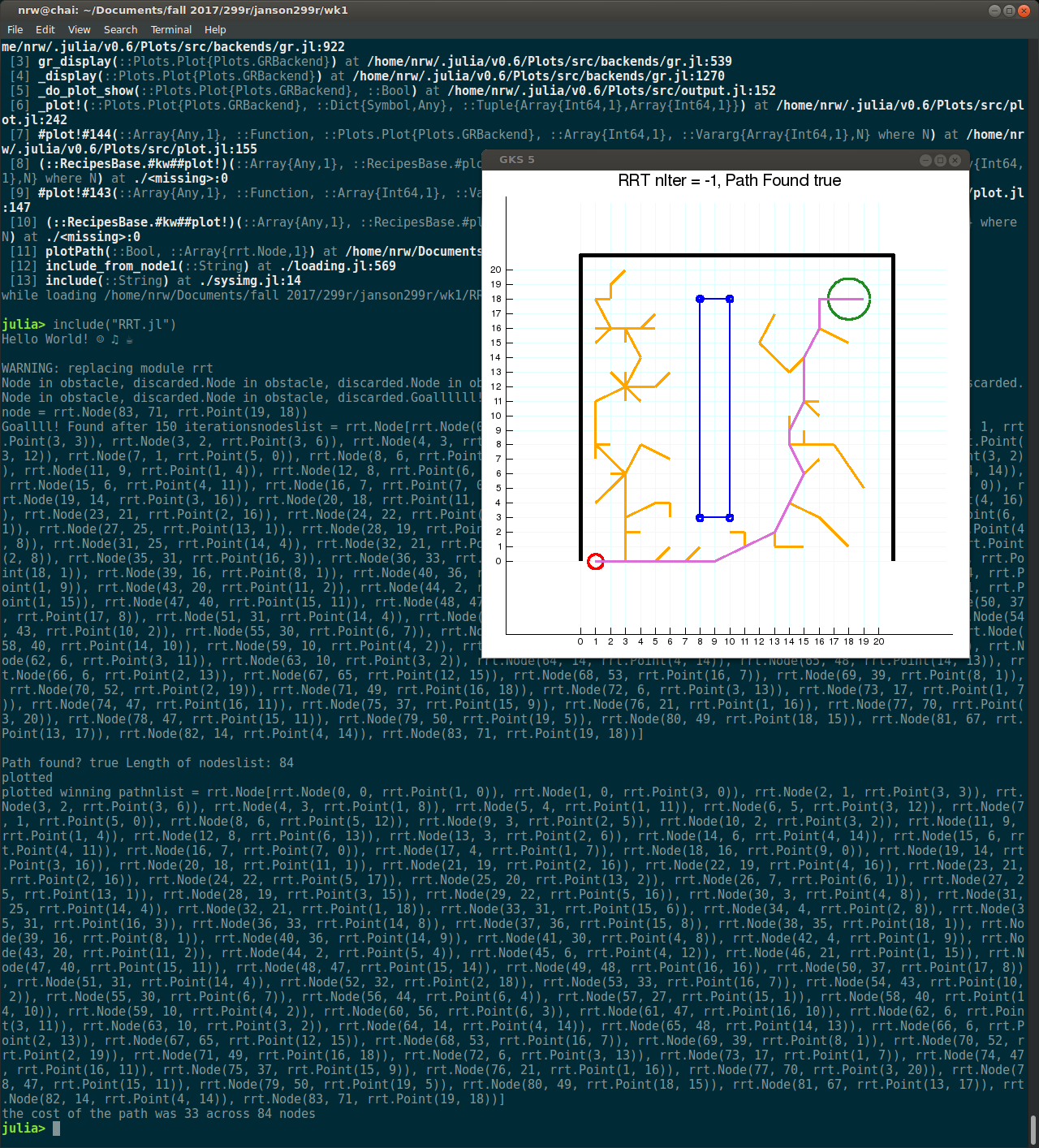
My own implementation of the RRT algorithm (rapidly expanding random trees) in Julia: collision checking issues, two runs, and a graph of how the solution path cost decreases with more iterations (aka if you find a path, you find a better path on average if you run more iterations). Although, it seems to converge not on what you might expect is about the optimal path cost (20* sqrt(2) = 28). And why would the optimal path cost decrease with more iterations, if the algorithm stops right when we find a solution? Hmm. I need to make more plots.

life pictures
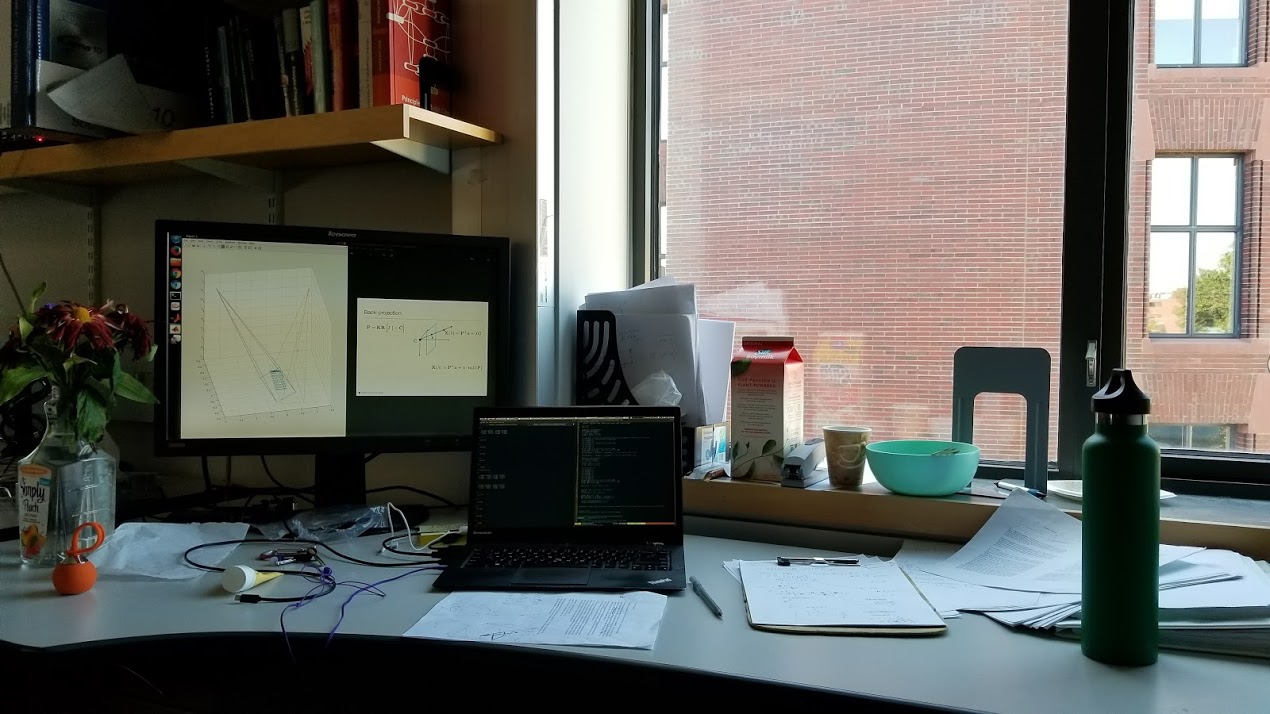
my desk
apple cobbler with cherry ice cream

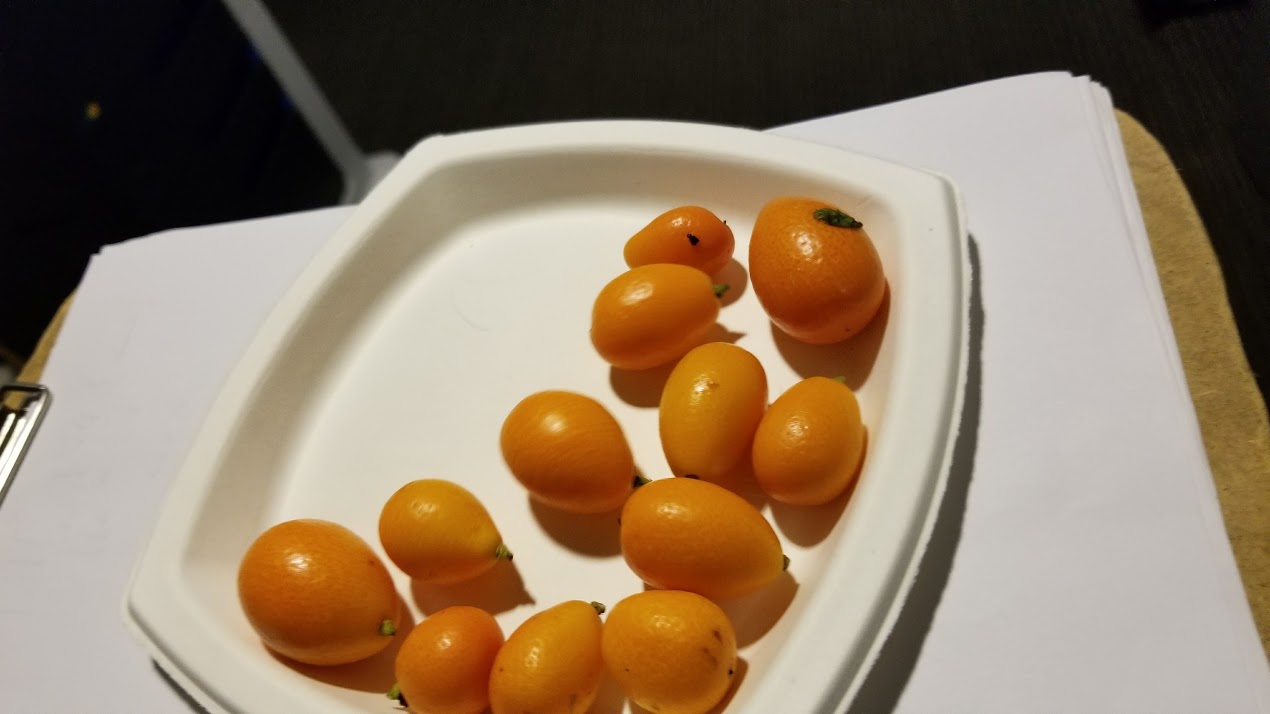
fancy career fair free food: kumquats!
my first pizza box obtained as free food (from fellowships information event)
sunset from my lab on the third floor

peach cobbleerrrrr peach cobbler whooo

robot socks! (no, I didn’t get any, I saw this between classes)