Whew
On the schedule today: water roses with fertilizer (weekly chore)
Probably exercise cat while in lecture?
Current concerns: will my parents have to go back to work thanks to Governor Kemp? Will Kemp and Trump be reelected in November? Will the public start hating China? I hear the refrain “do you believe China’s numbers” several times now. I feel so stressed about this becoming a mainstream narrative. Ironic looking back – us ogling at the potential of mass graves being dug in Iran, same happening in NYC. Feel a lot of anger that people think China didn’t take decisive action in shutting down their economy and don’t recognize that they shut down provinces (entire states) with less than a hundred known cases. That the virus hit there first so they had way less time to develop and manufacture tests. Lack of empathy and some mindset stuck in the 80s of China as a backwards totalitarian poor country with mindless citizens. Lack of a commonality of being in this together — city governments around the world doing their best. Interesting conversation yesterday with parents about the relative meritocracy of the current Chinese government. Have to work way up from village to city to province level, demonstrating skill at handling public responsibilities; there’s nothing like Trump coming in with no track record of competence and becoming the President. Why is the trust in government so high despite the lack of “elected representatives”? Still, lack of term limits makes me uncomfortable. Comparison to Mao era, when it really was “one person” at the top, and so unlike in our system where it takes a while to get things done but things tend to correct themselves, in more unified government if things go off the rails they go really far. But China is not so “one-man” now — it’s ruled by a group of people. I think a lot of Chinese sentiment in the West has not caught up in reality — I remember in secondary school, a teacher asking me if there were TVs in China. Reflection that a lot of younger Chinese have not witnessed the crazy transition in last 20-30 years of China into an advanced nation. Western media narrative as draconion and things only authoritarian governments can do, Chinese measures. That implies Chinese government was not transparent and enforced measures. But actually collectively we could do the same measures — lockdown was inconceivable two months ago but we “Western nations” did it! And Chinese governmental officials actually understand crisis communication and the need to be communicative and transparent. The idea of “individuals staying apart in hotels from family” without recognizing that in China the hotels and shelters are funded by the government, and that in people in China had the same worries of infecting their families. Just a lot of blaming China instead of being the world united in fighting a common enemy. Depressing.
Activist concerns: Supply supporting research and come up with modelling desire for supporting contact tracing and mask wearing cause. Maybe just a back of envelope calculation (dropping days to full contact tracing vs R0 vs infection). Op-ed (get to zero cases, potentially before reopening).
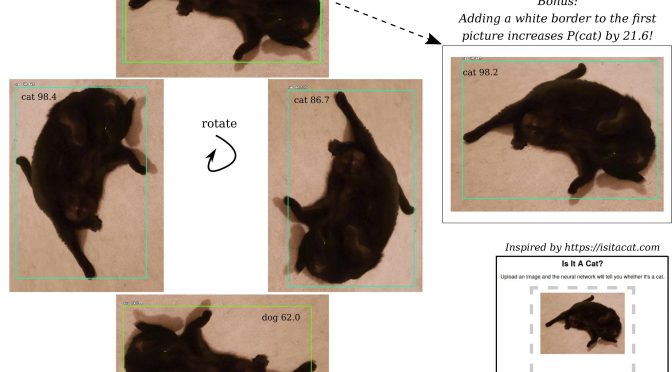
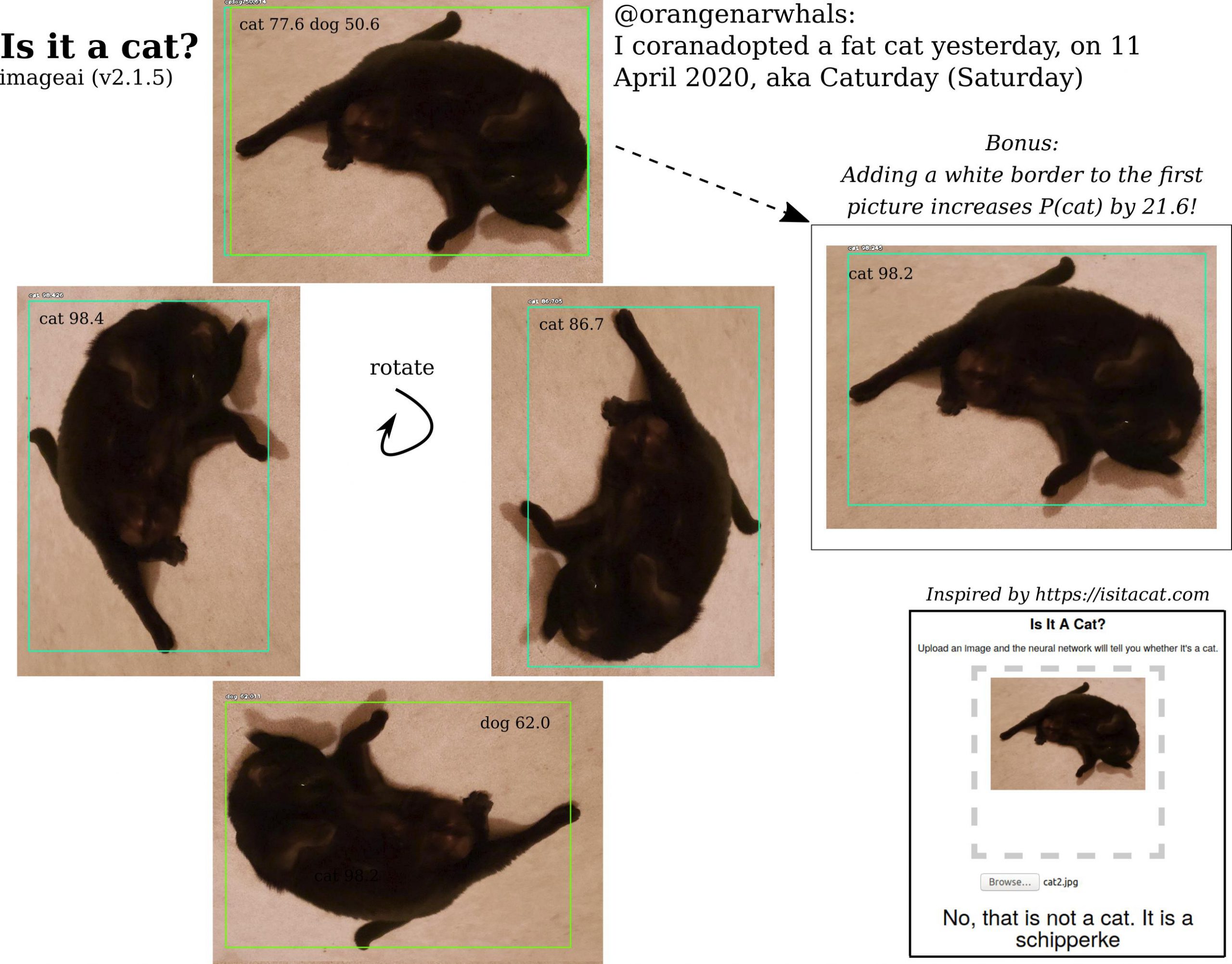
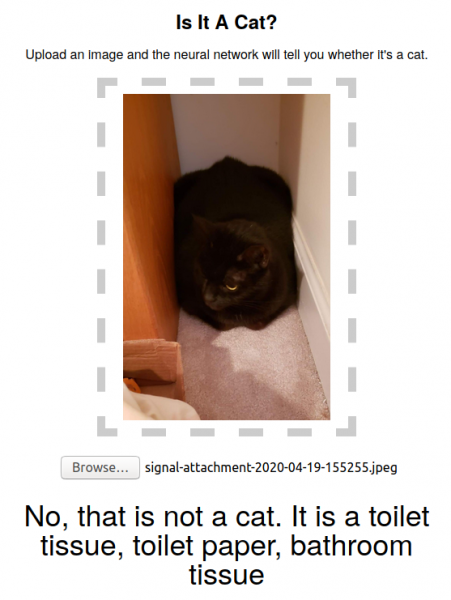
Cat worries: Have been getting it to jump up for food. Worry that maybe it was taught well to not jump on chairs / tables, which is a good habit, and we’re breaking that. Need to build cat tower instead potentially to get cat to exercise. Worried about liver disease from dropping calories too fast — proper amount fed, but all in puzzles. Kind of like measured free feeding — I was assuming she would get them all — does her lack of dedication mean she’s satiated and self regulating properly, or that she’s given up? Should probably get a baby scale — ethics of doing so — could I engineer one from stuff at home instead? Check for any fur loss – do I need to clip nails and how? Seen her start scratching with her rear legs again. Releasing her out of quarantine room – concerned about her escaping downstairs and then out the door somehow. Want to put collar on her (fitbit, which can also emit noise for finding her, and also tag in case she escapes outside) but concerned about the patch loss. Should put on calendar scheduled weighings and FeLV vaccine. Should’ve considered asking for bloodwork to make sure not hyperthyroidism?
Research worries: Quals. June 30th deadline my best chance at getting a good track record and passing quals. Better get on it. I’m doing some support work for other people, but worried the professor doesn’t hear about it – I should bring it up at group meeting – and also doesn’t contribute to my own research. Need to come up with thesis research topic – still interested in Halloween candy demo; how to get there? What are the key questions (palm sensors?)
Class worries: Still behind on homeworks and need to do final project. Likely should ask for incomplete…
Cooking: Should help out more / look for specific recipes to make.