
MEETERS (MITERS end of term showcase) today! ’twas awesome, lots of people came (both MIT students and people from the area and people from artist’s asylum).
Anyway, I fixed the servo horn that a kid broke @ Cambridge Mini Maker Faire (10 minutes), then I scratched my head a lot over rotating my hexapod. In the end, trial and error code and fellow MITERians ftw.
Still KISS code that I’m embarrassed to publish, but I know I’ll find this useful in the future.
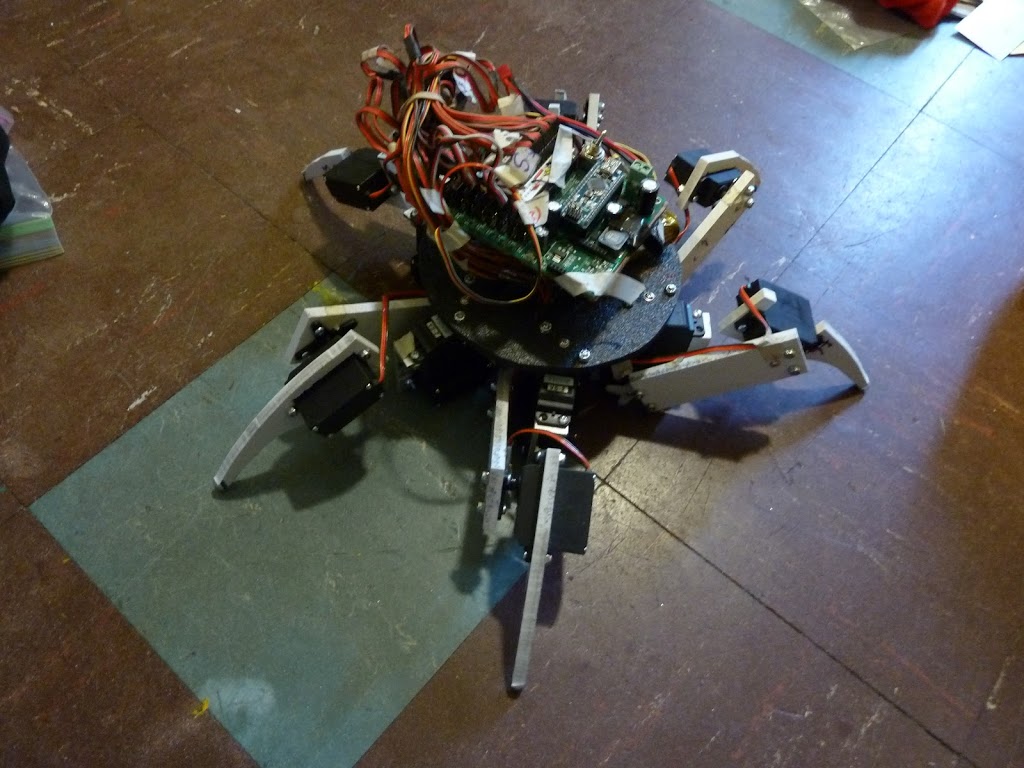
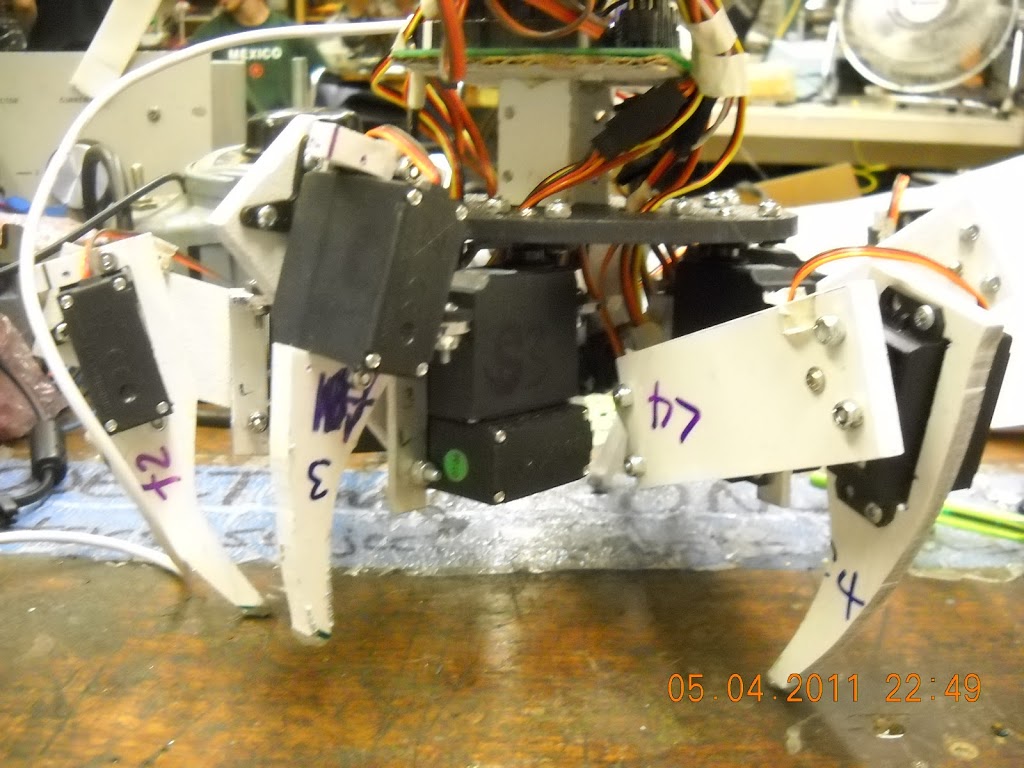
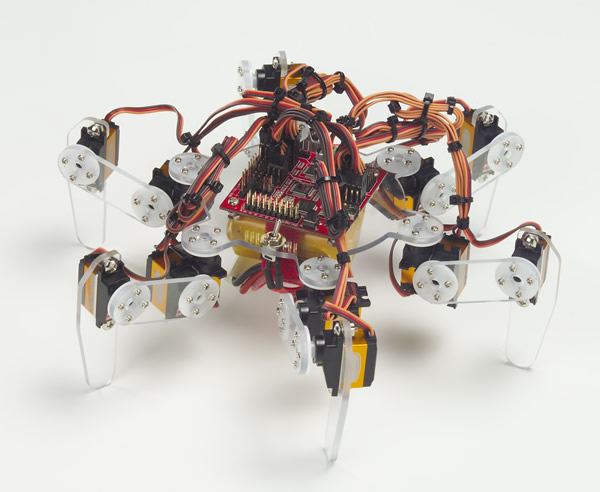
I rewrote the coxa in terms of rotating CW or CCW around the body, instead of backward and forward. Backward and forward were useful for the rectangular body, making it clear that moving coxa in the +J direction, “forward”, meant moving CW for servos on the left “half” of the body and CCW for servos on the right half. But now that I have a circular body, it just confused me (I couldn’t figure out how rotating was different walking forward, hah).
I don’t think I can get it to strife left / right with my current setup, where I’m pairing servos with Y splitter cables to get down to 12 channels, the max that the Arduino servo library supports.
(As it turns out, it is entirely possible to get more PWM outputs. David Lawrence, after I spammed everyone on MITERS asking for guidance, informed me that
Essentially, because the PWM waveform is output at 1000 Hz, it’s necessary to use the hardware timers, which only connect to a subset of the output pins. However, servos are quite happy to be driven by a 50 Hz PWM, in which case you can use one timer to control a whole bunch more of the GPIO pins. The higher frequency is only really necessary for interfacing with analog hardware.
)
Vid:
Code:
#include <Servo.h>
#define TIBIA 45
#define DELAY 300
#define COXA_CCW 70
#define COXA_CW 105
/*
~front~
A D
B E
C F
~back~
*/
#define AC_UP 92
#define AC_DOWN 125
int UP = AC_UP;
int DOWN = AC_DOWN;
Servo E_coxa;
Servo E_femur;
Servo E_tibia;
Servo B_coxa;
Servo B_femur;
Servo B_tibia;
Servo AC_coxa;
Servo AC_femur;
Servo AC_tibia;
Servo DF_coxa;
Servo DF_femur;
Servo DF_tibia;
void setup()
{
digitalWrite(2, OUTPUT);
digitalWrite(3, OUTPUT);
digitalWrite(4, OUTPUT);
digitalWrite(5, OUTPUT);
digitalWrite(6, OUTPUT);
digitalWrite(7, OUTPUT);
digitalWrite(8, OUTPUT);
digitalWrite(9, OUTPUT);
digitalWrite(10, OUTPUT);
digitalWrite(11, OUTPUT);
digitalWrite(12, OUTPUT);
digitalWrite(13, OUTPUT);
pinMode(1, OUTPUT);
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
pinMode(10, OUTPUT);
pinMode(11, OUTPUT);
pinMode(12, OUTPUT);
pinMode(13, OUTPUT);
E_coxa.attach(2);
E_femur.attach(3);
E_tibia.attach(4);
B_coxa.attach(5);
B_femur.attach(6);
B_tibia.attach(7);
AC_coxa.attach(11);
AC_femur.attach(12);
AC_tibia.attach(13);
DF_coxa.attach(8);
DF_femur.attach(9);
DF_tibia.attach(10);
}
void loop()
{
for (int i=0; i<=2; i++){
walkfwd();
}
for (int j=0; j<=2; j++){
walkbwd();
}
for (int k=0; k<=2; k++){
turnleft();
}
for (int l=0; l<=2; l++){
turnright();
}
}
void walkbwd() {
tibia();
b1();
b2();
b3();
b4();
}
void walkfwd() {
tibia();
tri1();
tri2();
tri3();
tri4();
}
void turnleft() {
tibia();
l1();
l2();
l3();
l4();
}
void turnright() {
tibia();
r1();
r2();
r3();
r4();
}
void tibia() {
AC_tibia.write(TIBIA);
B_tibia.write(TIBIA);
DF_tibia.write(TIBIA);
E_tibia.write(TIBIA);
}
void tri1() {
AC_coxa.write(COXA_CW);
E_coxa.write(COXA_CCW);
DF_coxa.write(COXA_CW);
B_coxa.write(COXA_CCW);
delay(DELAY);
};
void tri2() {
AC_femur.write(AC_DOWN);
E_femur.write(DOWN);
DF_femur.write(UP);
B_femur.write(UP);
delay(DELAY);
};
void tri3() {
AC_coxa.write(COXA_CCW);
E_coxa.write(COXA_CW);
DF_coxa.write(COXA_CCW);
B_coxa.write(COXA_CW);
delay(DELAY);
};
void tri4() {
AC_femur.write(AC_UP);
E_femur.write(UP);
DF_femur.write(DOWN);
B_femur.write(DOWN);
delay(DELAY);
};
void b1() {
AC_coxa.write(COXA_CCW);
E_coxa.write(COXA_CW);
DF_coxa.write(COXA_CCW);
B_coxa.write(COXA_CW);
delay(DELAY);
};
void b2() {
AC_femur.write(AC_DOWN);
E_femur.write(DOWN);
DF_femur.write(UP);
B_femur.write(UP);
delay(DELAY);
};
void b3() {
AC_coxa.write(COXA_CW);
E_coxa.write(COXA_CCW);
DF_coxa.write(COXA_CW);
B_coxa.write(COXA_CCW);
delay(DELAY);
};
void b4() {
AC_femur.write(AC_UP);
E_femur.write(UP);
DF_femur.write(DOWN);
B_femur.write(DOWN);
delay(DELAY);
};
void l1() {
AC_coxa.write(COXA_CCW);
E_coxa.write(COXA_CCW);
DF_coxa.write(COXA_CW);
B_coxa.write(COXA_CW);
delay(DELAY);
};
void l2() {
AC_femur.write(DOWN);
E_femur.write(DOWN);
DF_femur.write(UP);
B_femur.write(UP);
delay(DELAY);
};
void l3() {
AC_coxa.write(COXA_CW);
E_coxa.write(COXA_CW);
DF_coxa.write(COXA_CCW);
B_coxa.write(COXA_CCW);
delay(DELAY);
};
void l4() {
AC_femur.write(UP);
E_femur.write(UP);
DF_femur.write(DOWN);
B_femur.write(DOWN);
delay(DELAY);
};
void r1() {
AC_coxa.write(COXA_CW);
E_coxa.write(COXA_CW);
DF_coxa.write(COXA_CCW);
B_coxa.write(COXA_CCW);
delay(DELAY);
};
void r2() {
AC_femur.write(DOWN);
E_femur.write(DOWN);
DF_femur.write(UP);
B_femur.write(UP);
delay(DELAY);
};
void r3() {
AC_coxa.write(COXA_CCW);
E_coxa.write(COXA_CCW);
DF_coxa.write(COXA_CW);
B_coxa.write(COXA_CW);
delay(DELAY);
};
void r4() {
AC_femur.write(UP);
E_femur.write(UP);
DF_femur.write(DOWN);
B_femur.write(DOWN);
delay(DELAY);
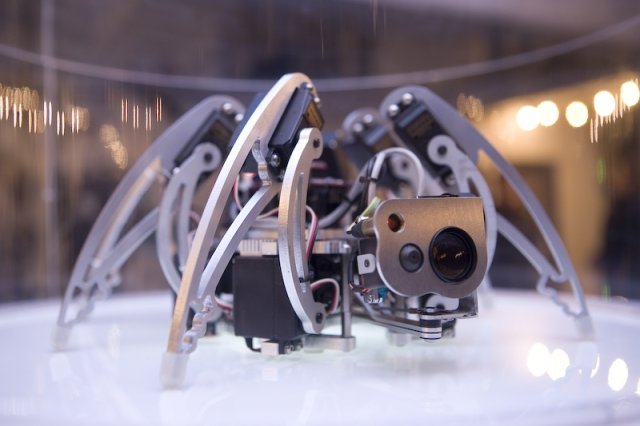
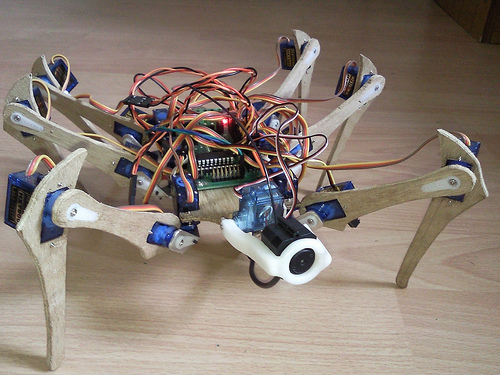
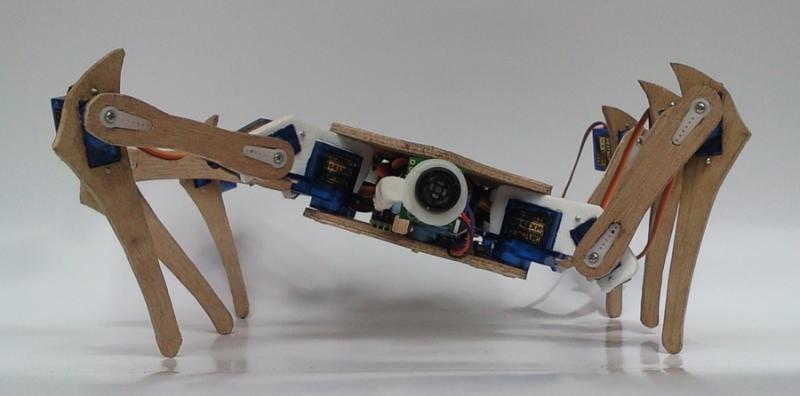
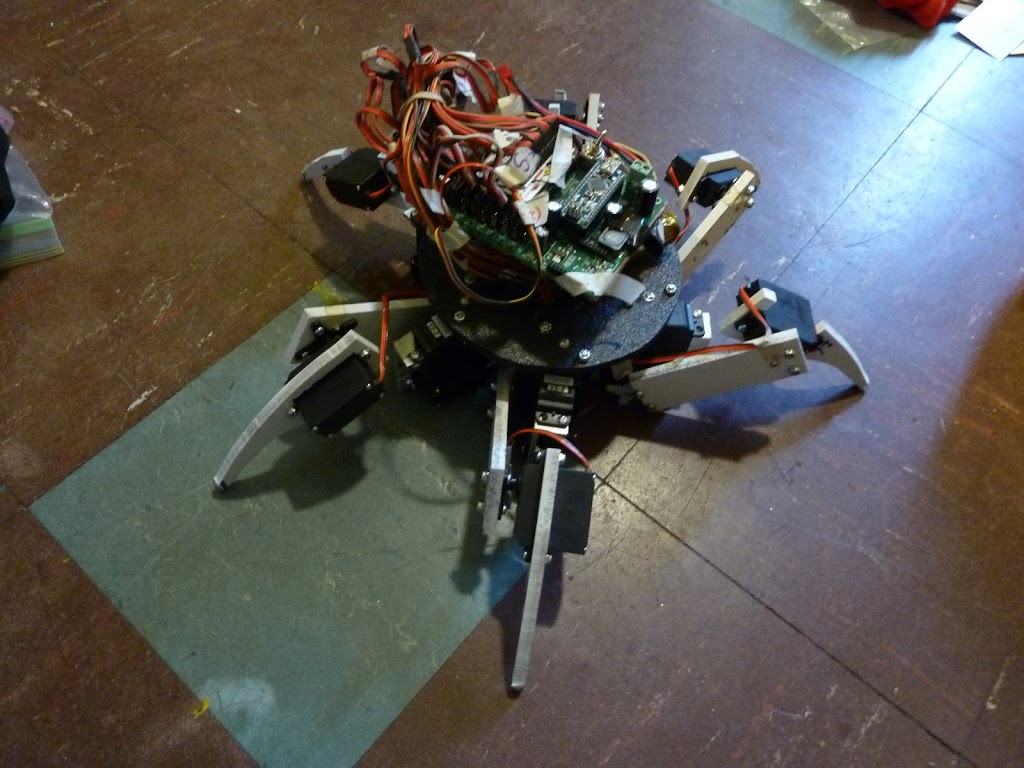
};and as always, pics:
https://picasaweb.google.com/nancy.ouyang/2007HexapodSpring2011









{kind=link}