hrm.
 |
| PREVIOUS || first | all posts | all images || NEXT |
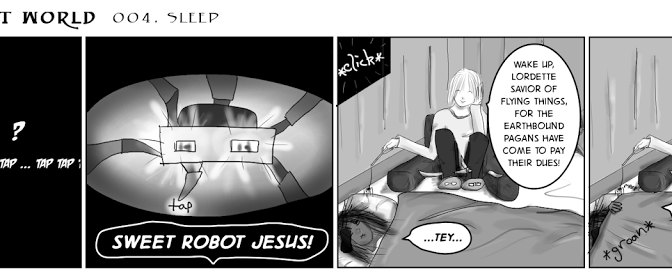
yes, those are rabbit slippers with glasses.
==
oh right, why am i doing a comic?
well, for fun, because there should be more engineering art, because my friends at MITERS say the most ridiculous things that are just begging to be turned into plot bunnies, and to practice drawing.
the idea is to stick crap on the internet and then look back at it in ten years and hopefully be able to measure some improvement. some sort of consistent practice thing. probably i would get better a lot faster if i did Actual Exercises (“deliberate practice”) like learning anatomy or drawing poses or copying existing art or something, but over the years i’ve learned that actually what matters the most is being able to do something consistently u.u Of course, I highly doubt this will be consistent after IAP, but it’ll be fun.
e.g. http://artistadodia.postbit.com/jonathan-hardesty.html (http://news.ycombinator.com/item?id=3031684), although I think the original inspiration is from reading megatokyo from the beginning to … somewhere in the middle, and also from that Right Brain Drawing Book thing that compares some of Da Vinci’s beginning sketches to the later ones.
…these two panels took me twice as long as yesterday, at three hours total (i think around 4 or 5 hours for the first two pages, and page three was a bit over 1.5 hours). now I have to reference backward for the colors and such, also i really should make up my mind what the shipping container looks like, also i have never been inside a shipping container, also i am too lazy to do research, also i have no idea what the setting actually is, also wtf i have to pick clothes for my characters and i want to pick fancy things but then i would have to draw it @__@
i was going to talk about vending machines and smoothing caps, but maybe tomorrow. x.x uweh wow, i’ve barely worked on anything this week building-wise. uh………… i was planning on an update 5x/wk for the next two weeks (the rest of iap) but this is kind of silly. maybe i will do the 2x/wk thing and go build more things <3
i think next week is turn razor scooter into electric vehicle week. i want to do it in a semi-reversible way, it’s just light enough now to carry around inside grocery shopping, so it definitely won’t be with batteries and a motor included. but part of the point of making it electric is to be able to haul groceries with it, hrm.