Hexahelicopter: ridiculousness.

http://www.youtube.com/watch?v=4Wy0s0S8eZQ
Q: How many species of hexapods (six-legged robots) are there in the world? Oh, oh dear.
A: A mind-boggling awesomespectacular amount.
Here’s a compilation of some of the hexapod craziness out there. The sheer number of different hexapod designs out there is mind-blowing.
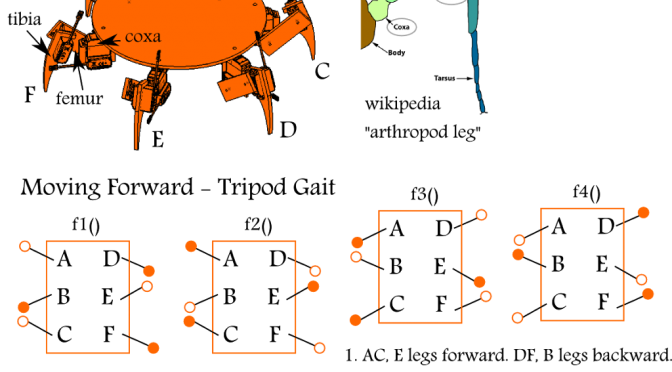
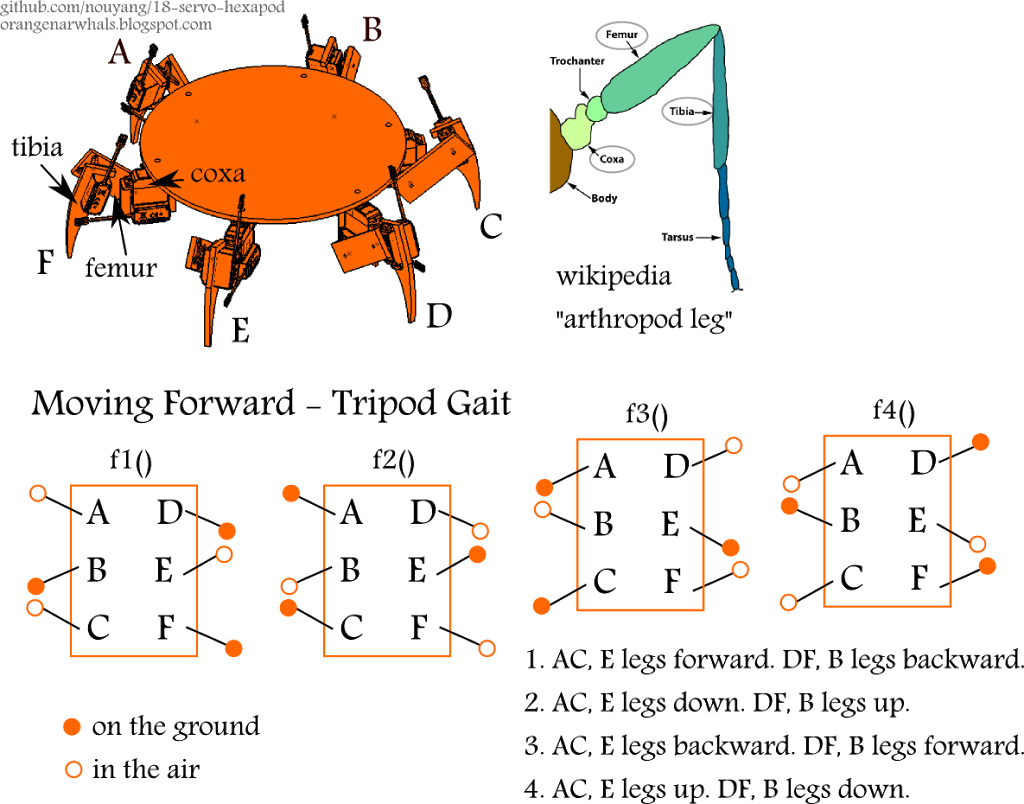
(p.s. for ideas of simple ways to build one, see my build post: http://www.orangenarwhals.com/?p=202)
Infinity Degrees-of-Freedom Style

http://www.youtube.com/watch?v=msaWXY3OuQQ
Chopsticks (yes, the robot frame was made of snapped-in-half bamboo chopsticks o.o)
http://letsmakerobots.com/node/26107
[update 8 dec 2011] Cheaply, out of wood:
http://forums.trossenrobotics.com/showthread.php?4102-Low-Cost-Hexapod

http://forums.trossenrobotics.com/showthread.php?t=2762
Hexapod that learns to walk using machine-learning algorithms! shiny shiny, and good music too:
http://www.youtube.com/watch?v=O3ovrT8pWww
http://hplusmagazine.com/2010/02/15/can-he-make-dancing-hexapod-robot-happy/
Tiny
 |
| http://www.custobots.com/products/pre-built-mini-hexapodinno-kc01001 http://www.youtube.com/watch?v=glNS81Kgk7g |
Sexy
 |
| http://www.hexapodrobot.com/forum/viewtopic..php?f=5&t=389 |
Sheer Giant Awesomeness Style
Spider Tank (An entire series on Youtube!)

http://www.wired.com/magazine/2011/02/st_obsessed_robot/
The cute prototype: http://www.youtube.com/watch?v=_6qpSOjtB2E

How it works: http://www.youtube.com/watch?v=is7x_atNl94 (someone attempts to explain it here: http://www.youtube.com/watch?v=NJjX_YbqTC4)
The series: http://www.youtube.com/watch?v=86Krv3gE-c4
Walking House-style (by MITERs alum Sam Kronick!) (yes, the scale of this is where humans fit inside easily)
http://www.youtube.com/watch?v=gkb6jfEwe0g
http://www.n55.dk/MANUALS/WALKINGHOUSE/walkinghouse.html
Simple Linkage Style
General idea: Cant one side up and move legs forward.
3D printed
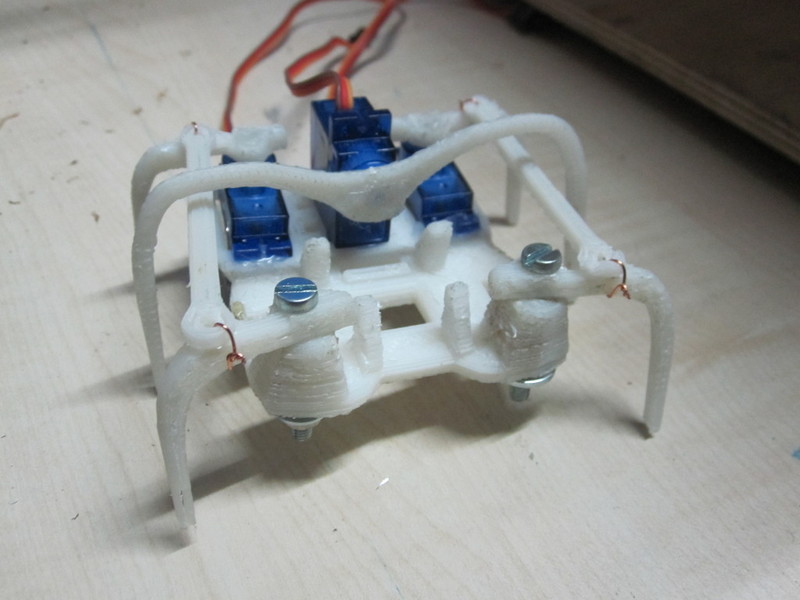
http://www.thingiverse.com/thing:5156
Rideable

http://www.instructables.com/id/Hexabot-Build-a-heavy-duty-six-legged-robot/
[update 8 dec 2011]
Look it’s bicycle powered
 |
| http://www.youtube.com/watch?v=jJY1fqzuqL0 |
Tiny (Pololu)
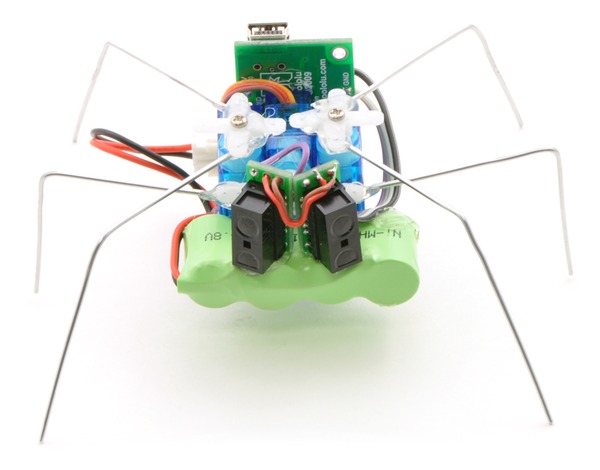
Simple Hexapod Walker: http://www.pololu.com/docs/0J42
Knexapod
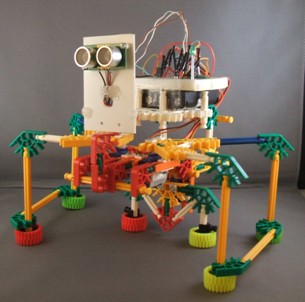
http://robotics.hobbizine.com/knexapod.html
Even simpler lego one:
http://www.youtube.com/watch?v=MZ9QOjx-7FQ
Boebots parallax:

Lego Pneumatics-style
 Mondo Spider– Hydraulic, electric
Mondo Spider– Hydraulic, electric
Jensen / Klann Linkage style “hexapods”
(for a comparison of the linkages: http://www.youtube.com/watch?v=WsRVu8BoSN4)
Uh… more like infinity legs. But same order of magnitude 🙂
Knex: http://robotics.hobbizine.com/knexabeast.html
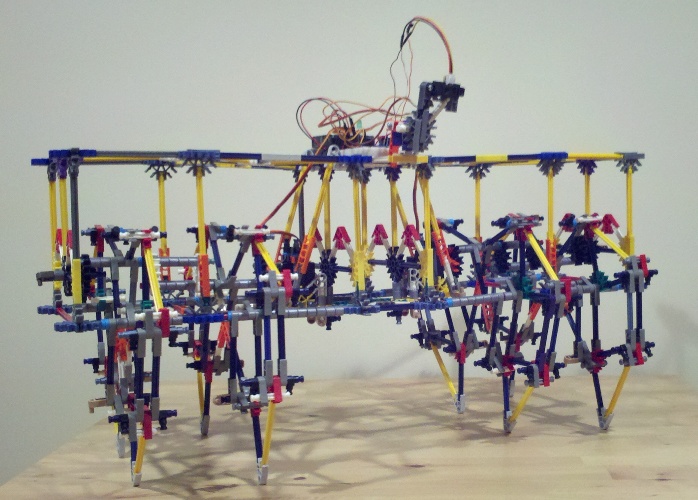
http://www.youtube.com/watch?v=hz4mflE2foM
Steam Powered! Wow.
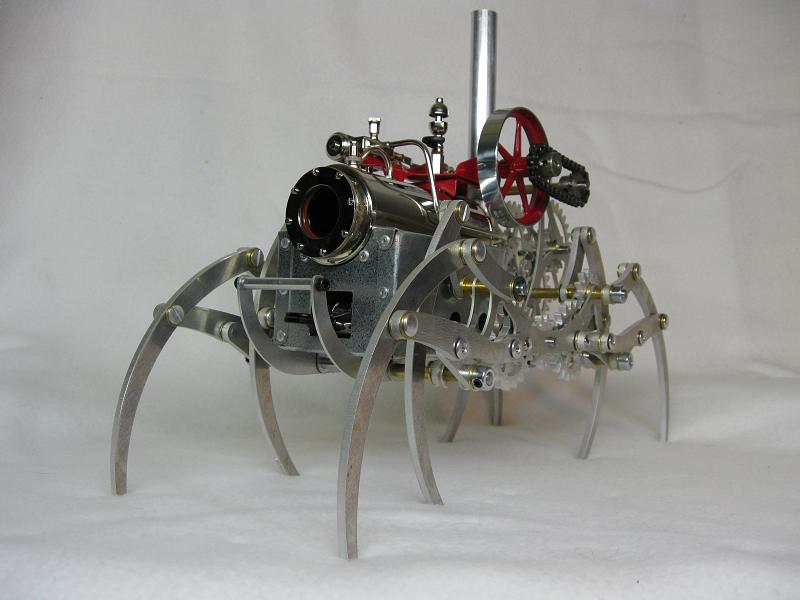
http://www.crabfu.com/steamtoys/rc_steam_spider/ The Crabfu site has many other wonders as well.
And semi-relatedly, cute mini-windbeest. D’awww…

http://crabfuartworks.blogspot.com/2011/01/gakken-otona-no-kagaku-strandbeest.html
Holy cow that’s robots on speed. This just has to be watched, no image will do it justice:
Hyper fast robot line following http://www.youtube.com/watch?v=4XiRxNkZleY
(more closeups here: http://www.youtube.com/watch?v=-Soq9qpK5Ac)
[update 8 dec 2011]
Rideable
okay, not simple-linkage-style, but rideable! yay
 |
| http://www.orangenarwhals.com/wp-content/uploads/2011/07/uak5f.gif |
http://www.youtube.com/watch?v=eE9HqGas7FM&feature=fvst
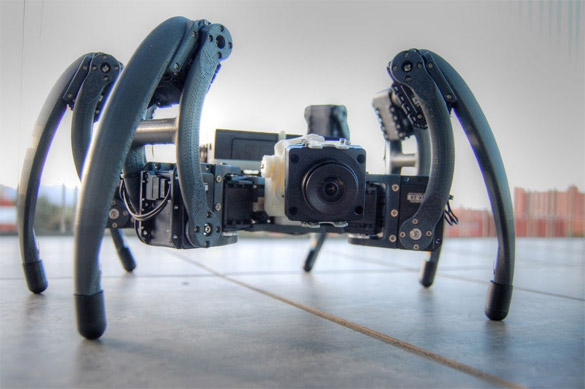
Research Hexapods
(theses are an excellent source of juicy details!)
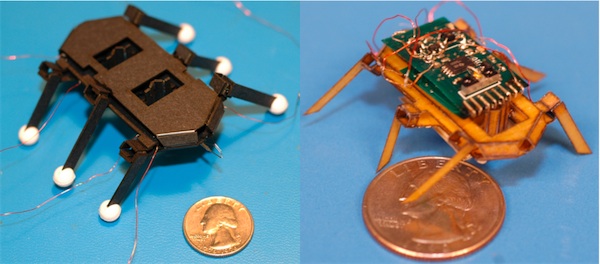
DASH Resilient High-Speed 16-gram Hexapedal Robot
By “resilient”, they mean “let me drop this robot off a the roof of a ten-story building and have it walk away perfectly fine”…. o___O (28 meters, actually)

http://www.youtube.com/watch?v=LsTKAtBBkfU
Thesis: http://www.eecs.berkeley.edu/~paulb/IROS09_DASH_submitted.pdf
Origami hexapod?
http://robotics.eecs.berkeley.edu/~ronf/Prototype/index.html
Climbing robot, DIGbot (awesome site!): http://biorobots.case.edu/projects/climbing/digbot/

About halfway through this vid, it climbs up a tree trunk! http://biorobots.case.edu/projects/climbing/digbot/natural_1.wmv
The thesis: http://biorobots.case.edu/projects/climbing/digbot/thesis_Diller.pdf
Another climbing robot, RiSE:
http://kodlab.seas.upenn.edu/~rise/newsite/
Pneumaticals and FAST and cute -^-^- Stanford Sprawl and iSprawl: (esp. see 0:43 mark)
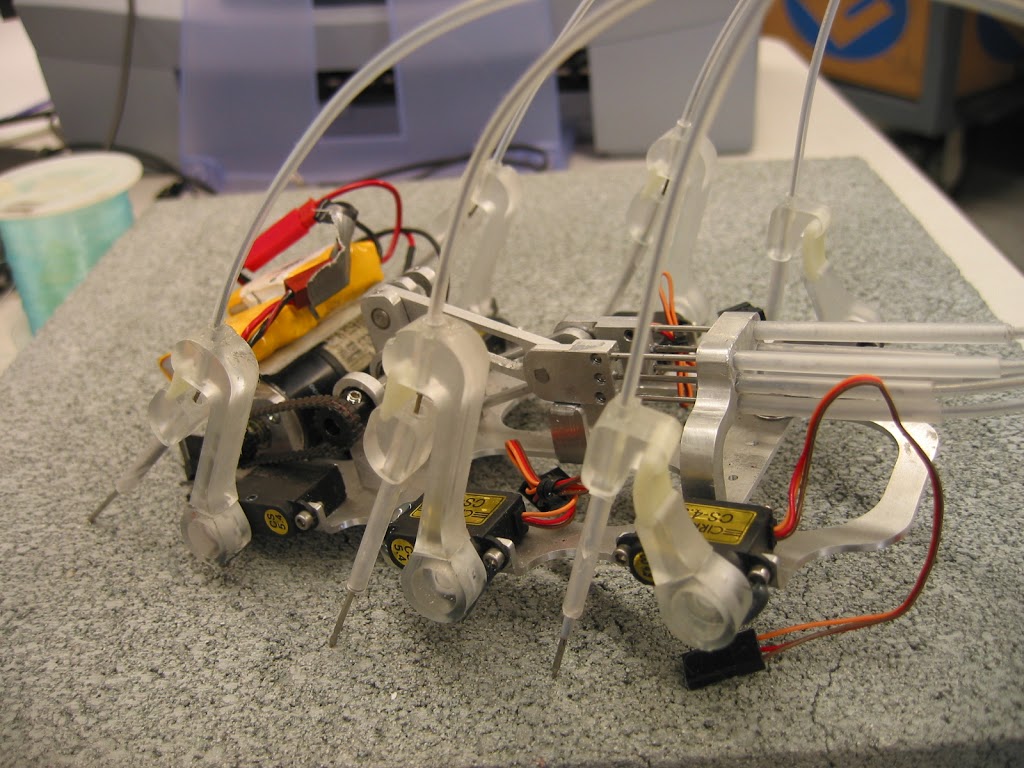
http://www.youtube.com/watch?v=GC4vWKenA7Y
The website: http://www-cdr.stanford.edu/biomimetics/ (click on “Robots”: http://www-cdr.stanford.edu/biomimetics/documents/sprawl/)
Thesis: http://bdml.stanford.edu/twiki/pub/Rise/IndependentSprawl/Kim_A038_CLAWAR04.pdf
Rhex, http://en.wikipedia.org/wiki/Rhex, http://kodlab.seas.upenn.edu/RHex/Home

Stiquito, http://en.wikipedia.org/wiki/Stiquito, http://www.era.lib.ed.ac.uk/bitstream/1842/2574/1/Rosano%20PhD%20Thesis.pdf
Random thesis with a lot of theory and less building: http://poisson.me.dal.ca/~dp_08_02/Site/Documentation_files/Build_Report.pdf
Controls Thesis nom nom: http://www.sigada.org/ada_letters/march2002/thirion.pdf
MIT Leg Lab Controls thesis: http://www.ai.mit.edu/projects/leglab/robots/robots.html

(pdf at http://www.ihmc.us/users/jpratt/publications/jpratt_masters_thesis1995.pdf)
Thesis-y youtube vid, background on hexapods:
http://www.youtube.com/watch?v=eunuHrTPS1o
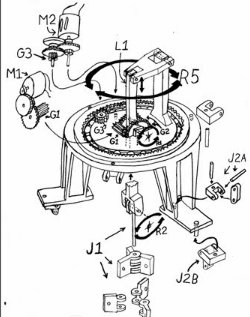
Old-school 18 motor hexapod, back in the 1980s: Odex I

http://www.theoldrobots.com/odex.html
Schematic: http://www.genomicon.com/2009/09/the-functionoids-are-coming/
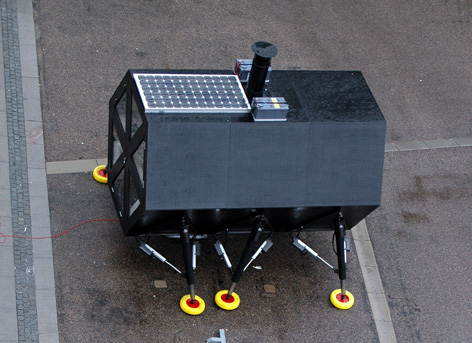
NASA GIANT hexapod, wheeled hybrid “ATHLETE”

http://www.youtube.com/watch?v=vwFrCpYavt4
What the…
Oh, and then you can use your robot as a platform and attach weird things to it. 😀
18 servo planter (Farmbot) — lynxmotion body

http://www.youtube.com/watch?v=ACtihXjq2B0
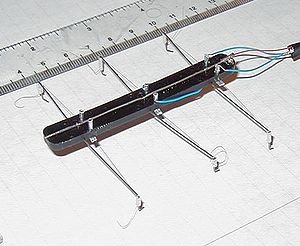
18 servo CNC Hexapod Router
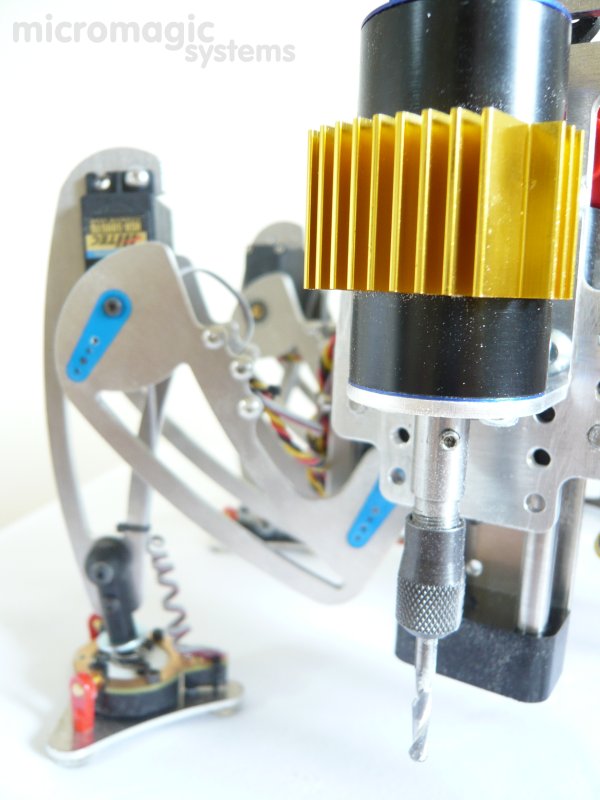
Video: http://www.youtube.com/watch?v=quN37YskoaM
Construction details: http://www.hexapodrobot.com/forum/viewtopic.php?f=14&t=12
Toys
ELEKIT MR-9722, aka Avoider III http://www.youtube.com/watch?v=nc-viPoI1iY

Hexbugs, which seem like toy rip-offs of research robots / the internet (Jamie, of Spider Tank / Wired fame, was a bit upset about this):

http://en.wikipedia.org/wiki/Hexbug
And that’s all for today folks. Whew.
Hope that gives some inspiration for building hexapod / spider / legged / AWESOME robots 🙂
Appendix
Sellers: (product datasheets are an excellent source of information for advice on how to build your own)
- Lynxmotion Hexapod products: http://www.lynxmotion.com/c-3-hexapods.aspx
- http://www.trossenrobotics.com/Quadropod-Robot-Hexapod-Robot-Kits.aspx
- http://en.innovati.com.tw/down/class/?3.html (http://www.youtube.com/watch?v=wbySvo31neI)
- http://www.crustcrawler.com/products/hexcrawler.php?prod=1 (http://www.youtube.com/watch?v=-xBEk7QWqHY) — good datasheet!
Misc. Documentation:
- http://www.robotshop.com/content/PDF/18fod-hexapod-rk-jnt-003.pdf
- http://www.pablogindel.com/trabajos/samsa-ii-2010/
- http://www2.plala.or.jp/k_y_yoshino/6legs/6legs_top_e.html
- http://users.ipfw.edu/abbott/pct/hexapod/HexapodProject.html
- ** http://www.pablogindel.com/trabajos/samsa-ii-2010/

- http://robot-kits.org

My main aids in this search: (I mirrored the images, because I hate seeing beautiful image collections destroyed by dead links)
- http://letsmakerobots.com/taxonomy/term/81 “hexapod” (relatedly, http://letsmakerobots.com/taxonomy/term/7311 “spider”)
- http://hackaday.com/tag/hexapod/
- Hexapod art gallery: http://www.hexapodrobot.com/forum/viewtopic.php?f=5&t=389
- Trossen Robotics Forum Gallery: http://forums.trossenrobotics.com/gallery/index.php
- Dancing Hexapod Forum Gallery: http://193.170.124.251/hexapod/forum/jgs_galerie.php
I mirrored the images here:
https://picasaweb.google.com/nancy.ouyang/StrangeAndBeautifulHexapodsMirroringImagesFromTheWeb
And, in closing, lego shrimp climbing! An entirely different way of solving “how to climb over obstacles.”
Lego Technic SHRIMP http://www.youtube.com/watch?v=mW4LJW6j05E
Puaghhhh. Who knew compiling images would eat 6 hours of my life???
====
edit 10/13/2010: more hexapods, don’t think they’re mobile but so pretty!

http://www.microbotic.org/singer.htm
=====
edit 17 dec 2011:
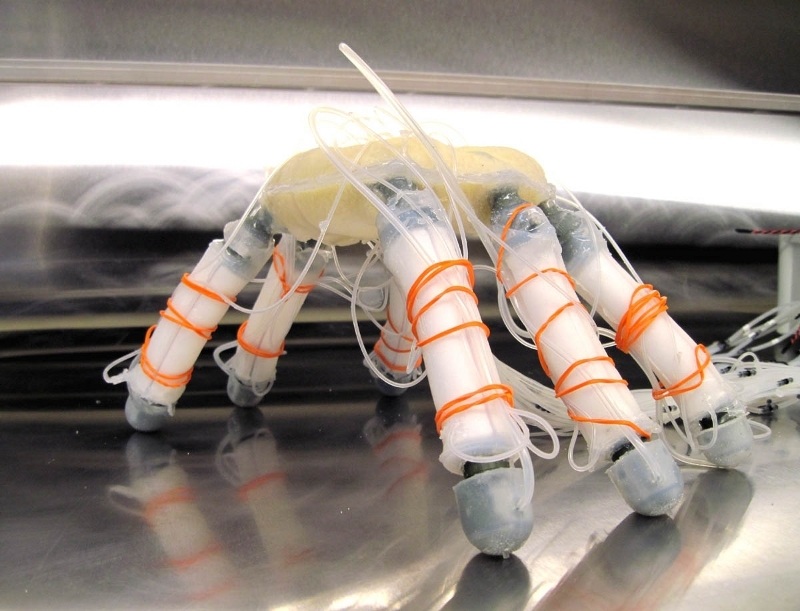
http://www.hizook.com/blog/2011/11/28/jambots-soft-robots-based-particle-jamming-hexapod-irobot
eeeee particle jamming hexapod! hehe. soft hexapod~~